Download

1 / 30
310 likes | 463 Views
John Bookless. Control of Lagrange point orbits using solar sail propulsion. Contents. Solar Sail Propulsion Hill’s Approximation of the three-body problem Quasi-periodic Orbit Optimal Controller Orbit Control near L 2 Orbit Control near L 1 Geostorm Mission Conclusions.

E N D
JohnBookless Control of Lagrange point orbits using solar sail propulsion
Contents • Solar Sail Propulsion • Hill’s Approximation of the three-body problem • Quasi-periodic Orbit • Optimal Controller • Orbit Control near L2 • Orbit Control near L1 • Geostorm Mission • Conclusions
Solar sail Propulsion • a – sail acceleration • - sail lightness number ms – solar gravitational parameter h – reflectivity R – distance between Sun and sail c -speed of light Ls – Solar Luminosity • – sail loading parameter • – pitch angle
Hill’s Equations Separation distance between Earth and Sail Non-dimensionalised with L = 1 RE (Earth Radii) and characteristic time
Libration points identified by setting • For on-axis libration points y=z=0 • The Lagrange points are located at • Artificial Libration points can be generated Sunward of L1 or Earthward of L2 using solar sail acceleration • Acceleration variation due to position relative to Sun
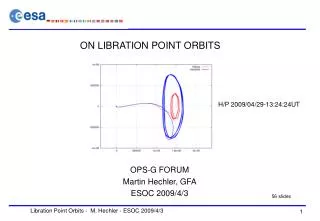
Quasi-periodic Orbit Hill’s equations can be linearised about the libration point (xo, yo, zo)using new coordinates Linearised equations have the form where the pseudo-potential function
For oscillatory motion, real eigenvalues l1,2are suppressed. The resultingsolution can be expressed as where Ay is the y-axis amplitude, Az is the z-axis amplitude, the eigenvalues and the eigenvector
The orbit is quasi-periodic as the ratio of the in-plane and out-of-planefrequencies is non-rational
Optimal Controller Orbit can be controlled by applying trims to solar sail area or pitching the sail relative to the Sun-line A – linear coefficient matrix B – control matrix C – output matrix x(t) – state vector y(t) – output vector u(t) – control vector The optimal controller selects a gain matrix which minimises the performance function where Q – state weighting matrix N – control weighting matrix
A suitable gain matrix is calculated by solving the Ricatti equation for M where M is the performance matrix and is related to the performance function The optimal gain matrix is evaluated as Sail area control Components of sail acceleration Sail area variation control matrix
Partial derivatives with respect to acceleration evaluated at a=f=0 Control matrix Sail pitch and yaw angle control Sail pitch and yaw angle control matrix
Partial derivatives with respect to pitch angle and with respect to yaw angle evaluated at a=f=0 Control matrix
The error between the actual position and desired position For solar sail area control, the acceleration variation is calculated using For sail pitch and yaw angle control
Orbit control near L2 Orbit Insertion xo = 230RE ko = 0.008mms-2 Ay = 20RE C = -0.0131 Manifold insertion at 19.1RE from Earth Solar sail winds onto nominal orbit within ~91 days
Acceleration varies between 0.0068→0.0114 mms-2 For a 200kg sail + payload mass, area varies between 152→254 m2 Linear relationship between required acceleration and required area Figure below based on sail loading s=12gm-2 A 100 kg payload could be controlled using a 129 m2 solar sail Average DV=280 ms-1 per year
Pitch and Yaw angle control xo = 230RE ko = 0.01mms-2 Ay = 20RE
Pitch angle -42.9o→2.9o Yaw angle -0.69o→0.78o A 200kg sail + payload mass could be controlled using a 222 m2 sail Sail area / payload mass gradient = 1.1268 for loading s=12gm-2
Orbit control near L1 Orbit Insertion xo = -240RE ko = 0.014mms-2 Ay = 20RE C = -0.0120 Manifold insertion at 1.15RE from Earth Solar sail winds onto nominal orbit within ~320 days
Acceleration varies between 0.0115→0.0159 mms-2 For a 200kg sail + payload mass, area varies between 246→340 m2 Average DV=395 ms-1 per year
Telemetry Exclusion Region q = 3.5o D = 93,500km at libration point For area control, solar sail spends approximately 3.89 years within exclusion zone
Pitch and Yaw angle control xo = -240RE ko = 0.025mms-2 Ay = 20RE
Pitch angle -52.3o→8.3o Yaw angle -1.78x10-6 o→1.89x10-6 o Solar sail spends about 1/5th of orbit duration within telemetry exclusion zone A 200kg sail + payload mass can be controlled using a 529 m2 solar sail withloading s=12gm-2
Geostorm Mission Mission proposed by JPL to use solar sail to position a science payload Sunward of L1 ACE (Advanced Composition Explorer) Launched in 1997 Earth’s Magnetosphere
xo = -234.46RE ko = 0 mms-2 Ay = 50RE C = -0.01226 Manifold insertion at 11.15RE from Earth Solar sail winds onto nominal orbit within ~186.5 days
Un-deployed solar sail remains at L1 for 186.5 days • Solar sail is gradually deployed and spirals onto new orbit within 560 days • Area variation control used to prevent escape from new orbit
100 kg sail + payload mass Sail acceleration 0.24 mms-2 Sail area 2517 m2 Sail loading s=12gm-2 Sail mass = 30kg Payload mass = 70kg Average DV=6.184 kms-1 per year
Conclusions • Demonstrated orbit insertion and solar sail control techniques at a quasi-periodic orbit • Mission duration near Lagrange points not limited by lifetime of stored reaction mass • Low acceleration achievable with present day technology highlights a possible near-term application for solar sails • Possible trajectory identified for the proposed Geostorm mission • Initial delivery of un-deployed solar sail to L1 enables piggy-back transfer • Large DV requirement indicates that solar sails are the only viable propulsion option for a long-term mission