Download
1 / 17
190 likes | 481 Views
UAVs. Tommy Phillips Major (CIS). What are UAVs?. A UAV (unmanned aerial vehicle) also known as a drone is an aircraft without a human pilot. It can be controlled two ways: Autonomously by computers in the vehicle itself. Under the remote control of a navigator or a pilot .

E N D
UAVs Tommy Phillips Major (CIS)
What are UAVs? • A UAV (unmanned aerial vehicle) also known as a drone is an aircraft without a human pilot. • It can be controlled two ways: • Autonomously by computers in the vehicle itself. • Under the remote control of a navigator or a pilot. • These types of pilots are called Combat Systems Officer.
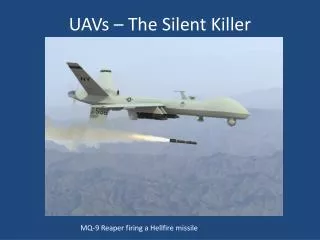
MQ-9 • This is MQ-9 Reaper, it is an UAV and it has been implemented in supporting our troops over seas in Afghanistan. This Reaper has the ability to be used for attacking or for surveillance.
MQ-9 continued • MQ-9 Reaper specifications… • http://www.youtube.com/watch?v=kSpOYZR0klA • A UAV in action… • http://www.youtube.com/watch?v=O6OUkOCrfKk&feature=related
Non-military UAVs • This is the Aerovision Fulmar, its main application being to aid fishermen finding tuna banks in the ocean. • A police drone used for surveillance.
Other UAV applications • The largest use of UAVs is in the military, but there are other civil uses. • Some examples are, UAVs are used in forest fires to see where the fire is spreading, and also used for non-military surveillance such as oil pipelines. • UAVs are used in applications that are to dull, dirty, or dangerous for manned aircraft whether it is military or non-military.
Programming aspects… • The UAV programming language is called Flight Processing System (FLIPS) for unmanned aerial vehicles. • High level missions are compiled into a hardware independent instruction set architecture (ISA), which you can freely implement on your own UAV platforms.
Step 1 • Step 1 is the high level coding • The user will program a mission in the high level FLIPS language. • A missions syntax should be highly readable and easy to understand.
Step 1 continued… • commands Normal = 0 Takeoff = 1 Inverted = 2 Hover = 4RollLeft = 8RollRight = 16 Trigger = 32 Loiter = 64 Land = 128LoiterAndLand = 192waypoints Atlanta = 33.748995 -84.387982NewYork = 40.714269 -74.005973 London = 51.00652 -0.126708 SECorner = (100m, 0m)NECorner = (100m, 100m)NWCorner = (0m, 100m)SWCorner = (0m, 0m) • Takeofffly to Atlanta at 50 metersNormalfly to NewYorkfly at 1000 feetNormalfly to Londonfly to Atlanta at 250 feet// waypoints.h Example CourseNormalfly to SECorner at 75 metersfly to NECornerNormalfly to NWCornerNormalfly to SWCornerLoiterAndLandfly to (50m, 50m)
Step 2 • The mission is then compiled into FLIPS assembly, which contains the low level flight instructions. • Basically the primitive flight instructions, the assembly code.
Step 2 continued • CMD 1 // TAKEOFF / Command #1POS X GEO -84.387982 // ATLANTA / 84.387982 W LongitudePOS Y GEO 33.748995 // ATLANTA / 33.748995 N LatitudePOS Z FIX -50.0 // 50.0 m (164.04199475065616 ft) AltitudeFLY // ExecuteCMD 0 // NORMAL / Command #0POS X GEO -74.005973 // NEWYORK / 74.005973 W LongitudePOS Y GEO 40.714269 // NEWYORK / 40.714269 N LatitudeFLY // ExecutePOS Z FIX -304.8 // 304.8 m (1000.0 ft) AltitudeFLY // ExecuteCMD 2 // INVERTED / Command #2POS X GEO -0.126708 // LONDON / 0.126708 W LongitudePOS Y GEO 51.00652 // LONDON / 51.00652 N LatitudeFLY // ExecutePOS X GEO -84.387982 // ATLANTA / 84.387982 W LongitudePOS Y GEO 33.748995 // ATLANTA / 33.748995 N LatitudePOS Z FIX -76.2 // 76.2 m (250.0 ft) AltitudeFLY // ExecuteCMD 0 // NORMAL / Command #0POS X FIX 100.0 // SECORNER / 100.0 m (328.0839895013123 ft) E DistancePOS Y FIX 0.0 // SECORNER / 0.0 m (0.0 ft) N DistancePOS Z FIX -75.0 // 75.0 m (246.06299212598424 ft) Altitude • FLY // ExecutePOS X FIX 100.0 // NECORNER / 100.0 m (328.0839895013123 ft) E DistancePOS Y FIX 100.0 // NECORNER / 100.0 m (328.0839895013123 ft) N DistanceFLY // ExecuteCMD 2 // INVERTED / Command #2POS X FIX 0.0 // NWCORNER / 0.0 m (0.0 ft) E DistancePOS Y FIX 100.0 // NWCORNER / 100.0 m (328.0839895013123 ft) N DistanceFLY // ExecuteCMD 0 // NORMAL / Command #0POS X FIX 0.0 // SWCORNER / 0.0 m (0.0 ft) E DistancePOS Y FIX 0.0 // SWCORNER / 0.0 m (0.0 ft) N DistanceFLY // ExecuteCMD 192 // LOITERANDLAND / Command #192POS X FIX 50.0 // 50.0 m (164.04199475065616 ft) E DistancePOS Y FIX 50.0 // 50.0 m (164.04199475065616 ft) N DistanceFLY // Execute
Step 3 • Next it can then be compiled/compressed into binary code, which then can be sent to the aircraft wirelessly. • Then the aircraft can execute the certain mission.
Step 3 continued • 170 = AA1 = 15 -84.387982 = 5 C2 A8 C6 A68 33.748995 = 8 42 6 FE F99 -50.0 = 9 C2 48 0 01 = 10 = 05 -74.005973 = 5 C2 94 3 F8 40.714269 = 8 42 22 DB 691 = 19 -304.8 = 9 C3 98 66 661 = 12 = 25 -0.126708 = 5 BE 1 BF BE8 51.00652 = 8 42 4C 6 AD1 = 15 -84.387982 = 5 C2 A8 C6 A68 33.748995 = 8 42 6 FE F99 -76.2 = 9 C2 98 66 661 = 10 = 0 • 3 100.0 = 3 42 C8 0 06 0.0 = 6 0 0 0 09 -75.0 = 9 C2 96 0 01 = 13 100.0 = 3 42 C8 0 06 100.0 = 6 42 C8 0 01 = 12 = 23 0.0 = 3 0 0 0 06 100.0 = 6 42 C8 0 01 = 10 = 03 0.0 = 3 0 0 0 06 0.0 = 6 0 0 0 01 = 1192 = C03 50.0 = 3 42 48 0 06 50.0 = 6 42 48 0 01 = 1255 = FF
Questions? • What does UAV stand for? • Unmanned Aerial Vehicle. • What are two non-military applications that UAVs can be used for? • Finding tuna banks, and checking on pipelines. • What is the UAV programming language that we discussed? • FLIPS.
Works citied • Gertler, Jeremiah. U.S. “Unmanned Aerial Systems.” www.fas.org. January 3, 2012. 5/14/2012. <http://www.fas.org/sgp/crs/natsec/R42136.pdf>. • http://defense-update.com/products/p/predatorB.htm • http://code.google.com/p/flips-uav/ • http://www.interconnectionworld.com/index/display/article-display.articles.connector-specifier.connector-applications.military-aerospace.2011.6.As-UAV-market-surges-connectors-adapt.QP129867.dcmp=rss.page=1.html