Download
1 / 1
10 likes | 281 Views
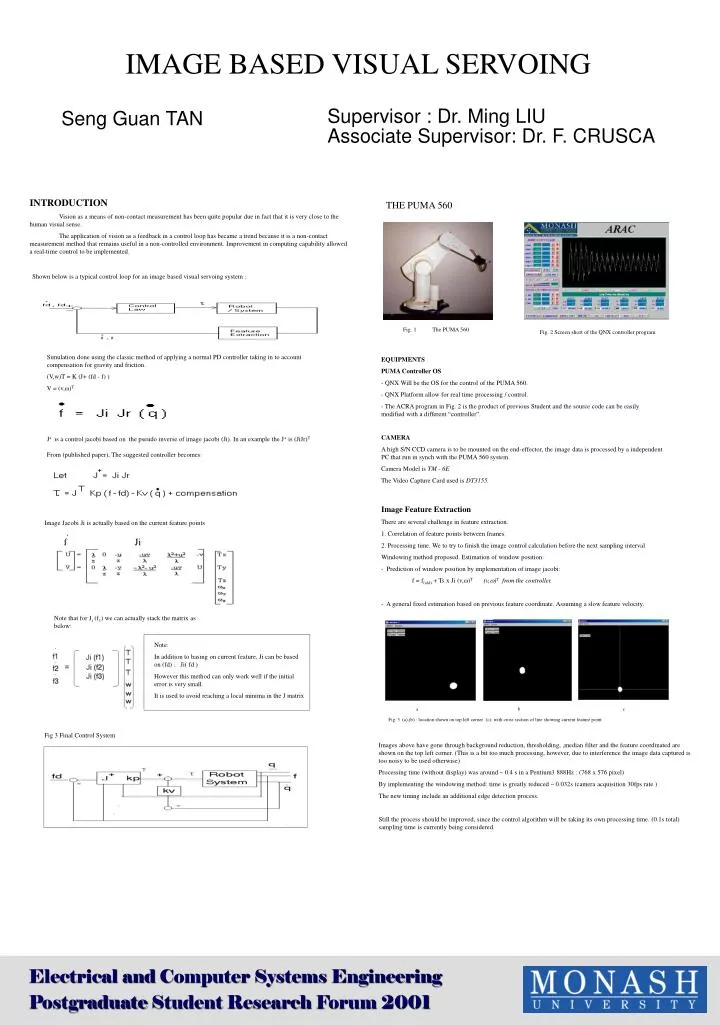
QNX Will be the OS for the control of the PUMA 560. - QNX Platform allow for real time processing / control. ... by a independent PC that run in synch with the PUMA 560 system. ...

E N D
IMAGE BASED VISUAL SERVOING Supervisor : Dr. Ming LIU Associate Supervisor: Dr. F. CRUSCA Seng Guan TAN INTRODUCTION Vision as a means of non-contact measurement has been quite popular due in fact that it is very close to the human visual sense. The application of vision as a feedback in a control loop has became a trend because it is a non-contact measurement method that remains useful in a non-controlled environment. Improvement in computing capability allowed a real-time control to be implemented. THE PUMA 560 Shown below is a typical control loop for an image based visual servoing system : Fig. 1 The PUMA 560 Fig. 2 Screen short of the QNX controller program Simulation done using the classic method of applying a normal PD controller taking in to account compensation for gravity and friction. (V,w)T = K (J+ (fd - f) ) V = (v,w)T J+ is a control jacobi based on the pseudo inverse of image jacobi (Ji). In an example the J+ is (JiJr)T From (published paper), The suggested controller becomes: EQUIPMENTS PUMA Controller OS - QNX Will be the OS for the control of the PUMA 560. - QNX Platform allow for real time processing / control. - The ACRA program in Fig. 2 is the product of previous Student and the source code can be easily modified with a different “controller”. CAMERA A high S/N CCD camera is to be mounted on the end-effector, the image data is processed by a independent PC that run in synch with the PUMA 560 system. Camera Model is TM - 6E The Video Capture Card used is DT3155. Image Feature Extraction There are several challenge in feature extraction. 1. Correlation of feature points between frames. 2. Processing time. We to try to finish the image control calculation before the next sampling interval Windowing method proposed. Estimation of window position: - Prediction of window position by implementation of image jacobi: f = f(old) + Ts x Ji (v,w)T (v,w)T from the controller. - A general fixed estimation based on previous feature coordinate. Assuming a slow feature velocity. Image Jacobi Ji is actually based on the current feature points . f Ji Note that for Ji (f1) we can actually stack the matrix as below: Note: In addition to basing on current feature, Ji can be based on (fd) : Ji( fd ) However this method can only work well if the initial error is very small. It is used to avoid reaching a local minima in the J matrix a b c Fig. 3 (a),(b) : location shown on top left corner (c): with cross section of line showing current feature point. Fig 3 Final Control System Images above have gone through background reduction, thresholding, ,median filter and the feature coordinated are shown on the top left corner. (This is a bit too much processing, however, due to interference the image data captured is too noisy to be used otherwise) Processing time (without display) was around ~ 0.4 s in a Pentium3 888Hz : (768 x 576 pixel) By implementing the windowing method: time is greatly reduced ~ 0.032s (camera acquisition 30fps rate ) The new timing include an additional edge detection process. Still the process should be improved, since the control algorithm will be taking its own processing time. (0.1s total) sampling time is currently being considered. Electrical and Computer Systems Engineering Postgraduate Student Research Forum 2001