Download
1 / 0
30 likes | 400 Views
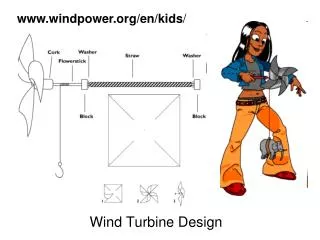
Wind Turbine Basics. Operating Point. Pitch. Wind. Lift, Drag. Blades. Nacelle. Generator. Geartrain. Hub. Primary Goal Spin at or near operating speed. Rotor Speed. Generator Speed. Yaw. Grid. Tower. Model the Generator, Grid, and Geartrain. Model:. Grid. Geartrain.

E N D