Download
1 / 1
10 likes | 179 Views
A Fuzzy Logic Approach to Collision Avoidance in UAVs. Michelle Hromatka, Jeffrey West, Dr. Saad Biaz. Objective. Approach. Results. Approach.

E N D
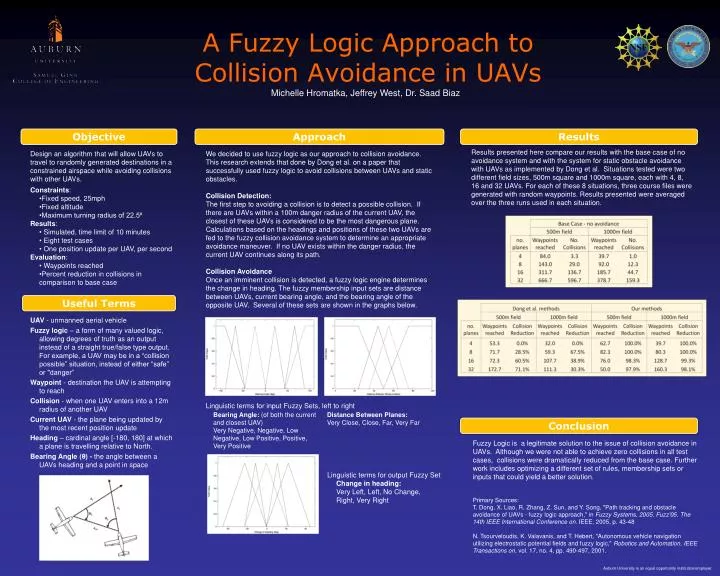
A Fuzzy Logic Approach to Collision Avoidance in UAVs Michelle Hromatka, Jeffrey West, Dr. Saad Biaz Objective Approach Results Approach Results presented here compare our results with the base case of no avoidance system and with the system for static obstacle avoidance with UAVs as implemented by Dong et al. Situations tested were two different field sizes, 500m square and 1000m square, each with 4, 8, 16 and 32 UAVs. For each of these 8 situations, three course files were generated with random waypoints. Results presented were averaged over the three runs used in each situation. • Design an algorithm that will allow UAVs to travel to randomly generated destinations in a constrained airspace while avoiding collisions with other UAVs. • Constraints: • Fixed speed, 25mph • Fixed altitude • Maximum turning radius of 22.5⁰ • Results: • Simulated, time limit of 10 minutes • Eight test cases • One position update per UAV, per second • Evaluation: • Waypoints reached • Percent reduction in collisions in comparison to base case We decided to use fuzzy logic as our approach to collision avoidance. This research extends that done by Dong et al. on a paper that successfully used fuzzy logic to avoid collisions between UAVs and static obstacles. Collision Detection: The first step to avoiding a collision is to detect a possible collision. If there are UAVs within a 100m danger radius of the current UAV, the closest of these UAVs is considered to be the most dangerous plane. Calculations based on the headings and positions of these two UAVs are fed to the fuzzy collision avoidance system to determine an appropriate avoidance maneuver. If no UAV exists within the danger radius, the current UAV continues along its path. Collision Avoidance Once an imminent collision is detected, a fuzzy logic engine determines the change in heading. The fuzzy membership input sets are distance between UAVs, current bearing angle, and the bearing angle of the opposite UAV. Several of these sets are shown in the graphs below. Linguistic terms for input Fuzzy Sets, left to right Useful Terms UAV - unmanned aerial vehicle Fuzzy logic – a form of many valued logic, allowing degrees of truth as an output instead of a straight true/false type output. For example, a UAV may be in a “collision possible” situation, instead of either “safe” or "danger” Waypoint - destination the UAV is attempting to reach Collision - when one UAV enters into a 12m radius of another UAV Current UAV - the plane being updated by the most recent position update Heading – cardinal angle [-180, 180] at which a plane is travelling relative to North. Bearing Angle (θ) - the angle between a UAVs heading and a point in space • Bearing Angle: (of both the current and closest UAV) • Very Negative, Negative, Low Negative, Low Positive, Positive, Very Positive • Distance Between Planes: • Very Close, Close, Far, Very Far Conclusion Fuzzy Logic is a legitimate solution to the issue of collision avoidance in UAVs. Although we were not able to achieve zero collisions in all test cases, collisions were dramatically reduced from the base case. Further work includes optimizing a different set of rules, membership sets or inputs that could yield a better solution. Primary Sources: T. Dong, X. Liao, R. Zhang, Z. Sun, and Y. Song, "Path tracking and obstacle avoidance of UAVs - fuzzy logic approach," in Fuzzy Systems, 2005. Fuzz'05. The 14th IEEE International Conference on. IEEE, 2005, p. 43-48 N. Tsourveloudis, K. Valavanis, and T. Hebert, "Autonomous vehicle navigation utilizing electrostatic potential fields and fuzzy logic," Robotics and Automation, IEEE Transactions on, vol. 17, no. 4, pp. 490-497, 2001. • Linguistic terms for output Fuzzy Set • Change in heading: • Very Left, Left, No Change, Right, Very Right