Download
1 / 30
310 likes | 316 Views
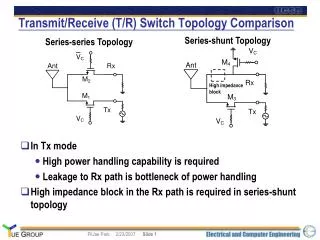
3F4 Optimal Transmit and Receive Filtering. Dr. I. J. Wassell. Transmission System. The FT of the received pulse is,. Transmit Filter, H T ( w ). Channel H C ( w ). Receive Filter, H R ( w ). y(t). +. Weighted impulse train. To slicer. N( w ), Noise. Transmission System. Where,

E N D
3F4 Optimal Transmit and Receive Filtering Dr. I. J. Wassell.
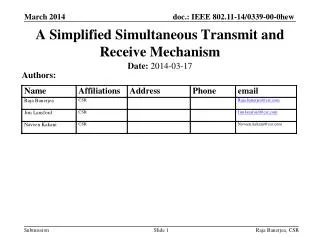
Transmission System • The FT of the received pulse is, Transmit Filter, HT(w) Channel HC(w) Receive Filter, HR(w) y(t) + Weighted impulse train To slicer N(w), Noise
Transmission System • Where, • HC(w) is the channel frequency response, which is often fixed, but is beyond our control • HT(w) and HR(w), the transmit and receive filters can be designed to give best system performance • How should we choose HT(w) and to HR(w) give optimal performance?
Optimal Filters • Suppose a received pulse shape pR(t) which satisfies Nyquist’s pulse shaping criterion has been selected, eg, RC spectrum • The FT of pR(t) is PR(w), so the received pulse spectrum is, H(w)=kPR(w), where k is an arbitrary positive gain factor. So, we have the constraint,
Optimal Filters • For binary equiprobable symbols, • Where, • Vo and V1 are the received values of ‘0’ and ‘1’ at the slicer input (in the absence of noise) • sv is the standard deviation of the noise at the slicer • Since Q(.) is a monotonically decreasing function • of its arguments, we should,
f(x) 0 x b Q(b) 1.0 0.5 0 b Optimal Filters
Optimal Filters • For binary PAM with transmitted levels A1 and A2 and zero ISI we have, • Remember we must maximise, Now, A1, A2 and pR(0) are fixed, hence we must,
Optimal Filters • Noise Power, • The PSD of the received noise at the slicer is, • Hence the noise power at the slicer is, n(t) v(t) HR(w) N(w) Sv(w)
Optimal Filters • We now wish to express the gain term, k, in terms of the energy of the transmitted pulse, hT(t) • From Parsevals theorem, • We know,
Optimal Filters • So, • Giving, • Rearranging yields,
Optimal Filters • We wish to minimise,
Optimal Filters • Schwartz inequality states that, With equality when, Let,
Optimal Filters • So we obtain, All the terms in the right hand integral are fixed, hence,
Optimal Filters • Since l is arbitrary, letl=1, so, Receive filter • Utilising, And substituting for HR(w) gives, Transmit filter
Optimal Filters • Looking at the filters • Dependent on pulse shape PR(w) selected • Combination of HT(w) and HR(w) act to cancel channel response HC(w) • HT(w) raises transmitted signal power where noise level is high (a kind of pre-emphasis) • HR(w) lowers receive gain where noise is high, thereby ‘de-emphasising’ the noise. Note that the signal power has already been raised by HT(w) to compensate.
Optimal Filters • The usual case is ‘white’ noise where, • In this situation, and
Optimal Filters • Clearly both |HT(w)| and |HR(w)| are proportional to, ie, they have the same ‘shape’ in terms of the magnitude response • In the expression for |HT(w)|, k is just a scale factor which changes the max amplitude of the transmitted (and hence received) pulses. This will increase the transmit power and consequently improve the BER
Optimal Filters • If |HC(w)|=1, ie an ideal channel, then in Additive White Gaussian Noise (AWGN), • That is, the filters will have an identical RC0.5 (Root Raised Cosine) response (if PR(w) is RC) • Any suitable phase responses which satisfy, are appropriate
Optimal Filters • In practice, the phase responses are chosen to ensure that the overall system response is linear, ie we have constant group delay with frequency (no phase distortion is introduced) • Filters designed using this method will be non-causal, i.e., non-zero values before time equals zero. However they can be approximately realised in a practical system by introducing sufficient delays into the TX and RX filters as well as the slicer
Causal Response • Note that this is equivalent to the alternative design constraint, Which allows for an arbitrary slicer delay td , i.e., a delay in the time domain is a phase shift in the frequency domain.
Causal Response Non-causal response T = 1 s Causal response T = 1s Delay, td = 10s
Design Example • Design suitable transmit and receive filters for a binary transmission system with a bit rate of 3kb/s and with a Raised Cosine (RC) received pulse shape and a roll-off factor equal to 1500 Hz. Assume the noise has a uniform power spectral density (psd) and the channel frequency response is flat from -3kHz to 3kHz.
Design Example • The channel frequency response is, HC(f) HC(w) 0 f (Hz) w (rad/s) -3000 -2p3000 3000 2p3000
Design Example PR(f) • The general RC function is as follows, T 0 f (Hz)
Design Example • For the example system, we see that b is equal to half the bit rate so, b=1/2T=1500 Hz • Consequently, PR(f) T 0 f (Hz) 1500 3000 2p1500 2p3000 w(rad/s)
Design Example • So in this case (also known as x=1) where, • We have, Where both f and b are in Hz • Alternatively, Where both w and b are in rad/s
Design Example • The optimum receive filter is given by, • Now No and HC(w) are constant so,
Design Example • So, Where a is an arbitrary constant. • Now, • Consequently,
Design Example • Similarly we can show that, • So that,
Summary • In this section we have seen • How to design transmit and receive filters to achieve optimum BER performance • A design example