Download
1 / 16
160 likes | 353 Views
224 FINAL PROJECT- WIRELESS CONTROL OF A BOE-BOT. Tom Cohlmia-Scott Moffat-Ashley Nidiffer-Eric Yim. Objective. Our goal in this project was to use wireless technology to control a robot along a given path. To accomplish this we will integrate the Basic stamp and LabView programs. Parts.

E N D
224 FINAL PROJECT-WIRELESS CONTROL OF A BOE-BOT Tom Cohlmia-Scott Moffat-Ashley Nidiffer-Eric Yim
Objective • Our goal in this project was to use wireless technology to control a robot along a given path. • To accomplish this we will integrate the Basic stamp and LabView programs.
Parts • Assembled Boe-Bot, Parallax Robotic Kit #28132 • Blue Tooth Wireless Adapter, DBT120 • Wireless Card, eb500 • Gyroscope, ADXRS150EB Hardware Challenges • Basic Stamp Chip malfunctioned • Wireless card communication failure • ADC Chip was not provided
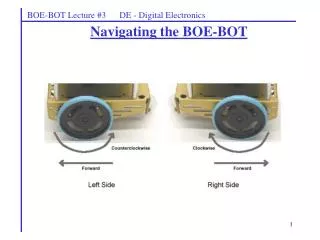
Calibration Servo Motors • Run servo motors at 750 and zero the motion Gyroscope • Run the robot in a circle, record time and angular distance • Use LabView to record the Gyroscope output • Graph the angular velocities vs. output voltage
Angular Velocity vs. Voltage • Calculate the linear equations of the line
Wireless • Learned Bluetooth software • Sent and Received text wirelessly
Programing We used 2 programming languages in this project: LabView and Basic Stamp. LabView Basic Stamp
Basic Stamp • Calibration of servo motors • Calibration of Gyroscope Servo Motor Gyroscope
LabView • Used to Record Gyroscope Calibration Data • Configure LabView to connect to Bluetooth • Write a LabView program to control Boe-Bot
Final Programs Final LabView front panel
Limits: Lack of ADC chip Speed of communication of the wireless Accuracy of LabView angle calibration Next Steps: Install and wire an ADC chip Integrate the gyroscope into the LabView program Integrate feedback into program Conclusion