Download
1 / 5
50 likes | 52 Views
The Caltech team aims to design, build, and document an autonomous ground vehicle that will win the 2005 DARPA Grand Challenge. This project involves a multidisciplinary approach and utilizes various engineering disciplines. The team is focused on conceiving, designing, implementing, operating, and repairing the vehicle.

E N D
Team Caltech Management Plan8 December 2004 Engineering and Applied Science California Institute of Technology R. M. Murray, Caltech
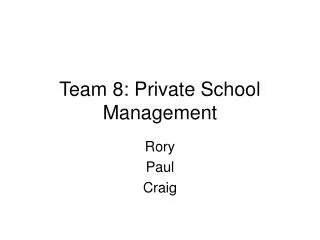
Goal: design, build and document an autonomous ground vehicle that wins the 2005 DARPA Grand Challenge CS/EE/ME 75 (2-9-1) ME 72 CS 11 EE/CS 148 ME/CS 132 Updated: 5 Dec 04 Team Caltech, 2004-05 2004 2005 Spring Summer Fall Winter Spring Summer Conceive Design Implement Operate Repair SURF Projects (4) DGC SURF (24) Bob Improved Infrastructure CDS 110a CDS 110b PlanningArchitecture Emb SysArch Desert Testing RACE (8 Oct 05) Vehicle Mods Alice Donations Campus Testing Purchase Senior thesis Projects Homer SURF Projects (2) R. M. Murray, Caltech
CDS 110ab ME 72 Instructors Ben Brantley Joel Burdick Richard Murray Pietro Perona CS 11 ME/CS 132 CS/EE 148 CDS 190ab Updated: 5 Dec 04 Team Caltech Organizational Chart 47 undergrads 3 grad students 5 instructors Caltech Support Maria Koeper (admin) Marionne Epalle (web) Project Manager Elliott Andrews Integrated Product Team Instr: Richard Murray $$ Vehicle Instr: Elliott AndrewsCoord: TBD Embedded Systems Instr: Ben Brantley Coord: TBD Planning Coord: Lars Cremean Instr: Joel Burdick Terrain Coord: Kristo Kreichbaum Instr: Pietro Perona Primary team membership L. Bruer V. Chavakula K, Cossel N. DonnellanK. Fisher M. Forte B. Heyneman R. Grogan C. Jeanty J. Jacks G. Hines M. Kimura E. Pallett B. Sexson H. BarnorE. BerchD. ChenT. FooteM. FriisE. Hsiao J. LambJ. MalmaudS. PatelD. RosenA. SomersC. Wang R. CableA. CraigJ. DonovanK. DunkleeI. GremmerS. HongH. Huang D. Kogan L. LindzeyB. PickettA. StewartA. TjiaJ. YosinskiS. Zerrade E. CadyR. FarmerJ. Feingold J. GillulaJ. LeibsD. Soudek Documentation TBD Modeling/Visualization Lars CremeanHaomiao HuangTBD Technical Advisors Erik Antonsson (JPL) Alex Fax (NGC) Jim Hall Larry Mathies (JPL) Larry Simons (JPL) Bob Rasmussen (JPL) Duane McRuer Dave van Gogh (NGC) Doug Robinson Chris PedersenKenny Meyer (JPL) SysAdmin Henry BarnorStirling Algermissen Alan Somers
Gazebo: spiral 1 • planning level • Gazebo: spiral 1 • planning level • Gazebo: spiral 2 • sensors • Gazebo: spiral 3 • dynamics • Gazebo: spiral 3 • full sim CS/EE/ME 75 • Alice: spiral 3 • Race ready • Rapid localtesting Break: 20 Jun – 4 Jul (2 weeks) Field Test #4: 21-25 Mar 04 FN: des-,ign, docs MT: PDR FN: CDR CS/EE/ME 75 (2-9-1) Field Test #5: 13-17 Jun (SURF) Shop/Local: 4 weeks Field Test #6: 2 weeks Shop/Local: 3 weeks Field Test #7: 2 weeks • Homer: spiral 2 • backup • Bob: spiral 2 • backup/test • Alice: spiral 2 • Gimbaled sensor • Autonomous nav Updated: 5 Dec 04 CS/EE/ME 75 Timeline CS/EE/ME 75 DGC SURF (12 wks) CDS 190ab CDS 110a CDS 110b ME 72 ME/CS 132 EE/CS 148 CDS 190? CS 11 CS 11 • Homer: spiral 1 • local test runs Field Test #3: 27-30 Dec 04 FN: des-,ign, docs NQE: 28 Sep – 6 Oct RACE: 8 Oct 05 • Bob: spiral 1 sw/hw • New computing • Alice: spiral 1 • Actuated driving • Waypt following?
Project meeting: Mon, 7:30-8:30 pm Weekly project-wide meeting Present course materials (W1-5) Review team status (W6-9) Mandatory attendance for all team members + student volunteers Team meetings: weekly, 1 hour Work on team assignments Discuss component status Make decisions on design choices IPT Technical meeting: weekly, 1 hr Coordination of technical tasks IPT Management meeting: weekly, 1 hr Round robin: instructors + coordinators Review of top five issues Status charts Single chart to keep track of team activities, assignments, status Will use to manage priorities in Q3-Q4 Specifications and interfaces System and component level specs Component interface definitions Bugzilla Detailed task management database Wiki Component documentation Meeting notes Php bulletin board (phpBB) Group discussions on open issues Project Management Activities and Tools R. M. Murray, Caltech