Download
1 / 41
410 likes | 561 Views
Computer-Controlled Systems T heory and Design. Associate Professor: Li Li Email: lili@tongji.edu.cn Phone:13564033457 Department of Control Science and Engineering Tongji University. Course Information. Time: 10:00-11:40am, Friday 10:00-11:40pm, Tuesday (even weeks)

E N D
Computer-Controlled Systems Theory and Design Associate Professor: Li Li Email: lili@tongji.edu.cn Phone:13564033457 Department of Control Science and Engineering Tongji University
Course Information • Time: 10:00-11:40am, Friday 10:00-11:40pm, Tuesday (even weeks) • Office hour:10:00-11:40,Tuesday (odd weeks), 622 • Venue: 综A209 • Modules + Experiments • Grading Procedure: • in-term evaluation • experimental results • final paper examination. • Important Formula: Success=Hard Work + Good Luck
Chapter 1 Computer Control
Contents 1.1 Introduction to CCS 1.2 Classification of CCS 1.3 History and future of CCS 1.4 Computer-control theory 1.5 Summarization
1.1 Introduction • Comparison between ACS and CCS
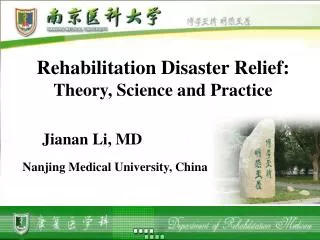
Computer Clock y(t) u(t) {y(tk)} {u(tk)} A-D Algorithm D-A Process 1.1 Introduction • A typical computer-controlled system Synchronization a sequence of numbers Figure 1.1: Schematic diagram of a computer-controlled system
1.1 Introduction ACS CCS Process Actuator Measure Controller (digital computer) Adapter (A/D, D/A) Process Actuator Measure Controller (correcting network) Structure: Parts: Analog Analog + Digital Continuous analog Discrete analog Discrete digital Signals: Analog
1.1 Introduction • Virtues • Strong computation ability for realizing complex control algorithms, which are easily modified • High precision:10-70 (analog: 10-2) • High volume memory: store a great deal of information • Adaptive and robust: self-learning and reasoning • High efficiency: multi-control loop ( analog: one ) • Defects • Error: quantization error • Computation delay: especially for serial computation and complex control algorithms
1.2 Classification 1.2.1 Operation Guide Control System • Open-loop control system • Simple, safe, reliable • For design, tuning • For data collection and handle
1.2 Classification 1.2.2 Direct digital control (DDC) • Close-loop control system • Multi-control algorithms • Instead of multi-analog controllers to control multi-loops simultaneously
1.2 Classification 1.2.3 Supervisory computer control (SCC) • Upper computer control + lower computer control (analog or digital) • Upper computer: high-level control and management for set point • control, sequential control and optimal control • Lower computer: control the process
1.2 Classification 1.2.4 Distributed control system (DCS) • DCC: for process • SCC: coordinate and supervise • DCCs for shop’s optimal control • Factory level: make plan for the • factory and report the data of • SCCs and DCCS • Management level: make long- • term plan, coordinate the full • company and global optimization
1.3 History and Future • 1952-1965: pioneering period • Thomson Ramo Woodridge and Texaco: a computer-controlled system for the polymerization unit for a refinery factory in Texas was designed • 1965-1972: industry application period • Minicomputer • Computer central control
1.3 History and Future • 1972-: development period • Microcomputer Period and General Use of Computer Control • PLC (Programmable logic controller) • Distributed control system • Computer integrated system • Embedded system • Network control system
1.3 History and Future • The future of the technology related to CCS • process knowledge • Continuous increasing process knowledge with slow speed • Process control system • measurement technology • Data merging • Soft measurement • computer technology • Computation ability, visualization, communication • programming • control theory • Model predictive control, adaptive control • More difficult control algorithm
1.4 Computer-Control Theory • Approximations of analog control system (ACS): CCSACS 1.4.1 Time dependence 1.4.2 A naive approach to CCS 1.4.3 Deadbeat control 1.4.4 Aliasing 1.4.5 Difference Equation
1.4 Computer-Control Theory 1.4.1 Time Dependence Example1.1 Time dependence in digital filtering Figure 1.4(a) The block diagram of a digital filter.
1.4 Computer-Control Theory • Phenomena: • The figure clearly shows that the sampled system is not Time-invariant because the response depends on the time when the step occurs. • Conclusion: • The response of the system to an external stimulus will then depend on how the external event is synchronized with the internal clock of the computer system. • The closed-loop system is a linear periodic systems.
1.4 Computer-Control Theory 1.4.2 A naive approach to CCS Example1.2 Controlling the arm of a disk drive • A schematic diagram of a disk-drive assembly is shown in Fig. 1.5.
1.4 Computer-Control Theory A Hard disk Drive System
1.4 Computer-Control Theory • Phenomena: • When sampling period is very small, the difference between the outputs of the systems is very small. • When sampling increases, the CCS will deteriorate. • Conclusion: • It is straightforward to obtain an algorithm for CCS simply by writing the continuous-time control law as a differential equation and approximating the derivatives by differences.
1.4 Computer-Control Theory 1.4.3 Deadbeat control Example 1.3 Disk drive with deadbeat control
1.4 Computer-Control Theory • Phenomena: • The excellent behavior of the CCS. • This behavior cannot be obtained with continuous-time system. • Conclusions: • The periodic nature of the control actions can be actually used to obtain control strategies with superior performance. • This kind of control strategy is called deadbeat control because the system is at rest when the desired position is reached. Such a control scheme cannot be obtained with a CTC.
1.4 Computer-Control Theory 1.4.4 Aliasing • Aliasing: The phenomenon that the sampling process creates new frequency components. • Sampling of a signal with frequency creates signal components with frequencies where s is the sampling frequency, and n is an arbitrary integer.
1.4 Computer-Control Theory • Phenomena: • Fig 1.10 and Fig. 1.11 are examples which indicate that sampling creates lower frequencies. Fig. 1.12 is the example shows sampling creates higher frequencies. • Conclusions: • From equation (1.6), we see that there will be low-frequency components created whenever the sampled signal contains frequencies are larger than half the sampling frequency. • All show that CCS cannot be fully understood within CTS framework, it is thus useful to have other tools for analysis.
1.4 Computer-Control Theory • Presampling Filters or Antialiasing Filters • Nyquist frequency: half of sampling frequency • To avoid the difficulties in Fig. 1.10, it is essential that all signal components with frequencies higher than the Nyquist frequency are removed before a signal is sampled. • The filters that reduce the high-frequency components of the signals are called antialiasing filter. • These filters are an important component of CCS. • The proper selection of sampling periods and antialiasing filters are important aspects of the design of CCS.
1.4 Computer-Control Theory 1.4.5 Difference Equation • CCS can be designed simply by using continuous time theory and approximating the differential equations describing the controllers by difference equations. • CCS have the potential of giving control schemes with behavior that cannot be obtained by CTS. • Sampling can create phenomena that are not found in LTI systems. • The selection of the sampling period is important and it is necessary to use antialiasing filters. The need for a theory for CCS.
1.5 Summarization 1.5.1 Inherently Sampled Systems • Sampled models are natural descriptions for many phenomena. The theory of sampled-data systems, therefore, has many applications outside the field of computer control. • Sampling due to the Measurement System • Radar • Economic Systems • Sampling due to Pulsed Operation • Biological Systems • Thyristor Control
The Sampling Theorem Difference Equation Numerical Analysis Transform Methods State-Space Theory Optimal and Stochastic Control Algebraic System Theory System Identification Adaptive Control Automatic Tuning 1.5 Summarization 1.5.2 How Theory Developed
1.5 Summarization 1.5.3 Main contents of the course • Goal: Understand, analyze and design CCS • Chapter 2: Sampling and Construction • Chapter 3: Z Transform • Chapter 4: Description of Computer-Controlled Systems • Chapter 5: Analysis • Chapter 6: Classic Design • Chapter 7: State Space Based Design
1.5 Summarization 1.5.4 Knowledge structure of Automation with Schematic Diagram of CCS