Download
1 / 12
120 likes | 223 Views
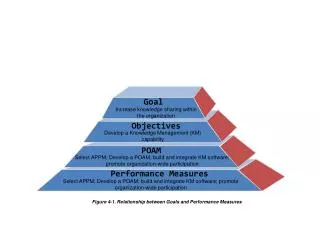
Measures of System Performance. Starrett Mini-Lecture #6. Questions. Which states are influenced by certain modes? Which states are capable of influencing certain modes?. Measures of System Structure. Right & Left Eigenvectors Controllability & Observability Participation Factors.

E N D
Measures of System Performance Starrett Mini-Lecture #6
Questions • Which states are influenced by certain modes? • Which states are capable of influencing certain modes?
Measures of System Structure • Right & Left Eigenvectors • Controllability & Observability • Participation Factors
Controllability-Type Information • How can we control a mode or which states influence certain modes? • Needed for deciding which variables to control or modulate • Left Eigenvectors => zo = L xo • Controllability Matrix => B' = L B
Controllability Index • z’ = Lz + LBDu = Lz + B’ DuDy = CRDx + DDu • kth row of B' = 0 => mode k is uncontrollable • Elements of rows tell which machines have the most influence • Left eigenvectors play a key role
Observability-Type Information • Which machines are most influenced by certain modes? • Needed for deciding which variables to use as input for controller feedback • Right Eigenvectors => x(t) = R z(t) • Observability Matrix => C' = C R
Observability Index • z’ = Lz + LBDu = Lz + B’ Du Dy = CRDx + DDu = C’Dx + DDu • ith column of C' = 0 => mode i is unobservable • Elements of columns tell which machines "show" the modes the most • Right eigenvectors play a key role
Participation Factors • Which machines participate in which modes? • Two-way measures -- contain both controllability and observability information • Unit-less & independent if EV scaling • Assumes a "super-position-like" analysis
Participation Factor Theory • Assume we are able to perturb only one state of the system (apply an initial condition along the axis of the kth state variable) • Initial Cond. xo = [0 0 ... 0 1 0 ... 0]T • Jordan IC zo = Lxo = [l1k l2k l3k ... lnk]T • Jordan solution => zi(t) = likel1t
Transform Back to x-Space Using Dx = R z • xk(t) = rk1 l1k el1t + rk2 l2k el2t + ... + rkn lnk elnt • recall at t = 0 => xko = 1 = rk1 l1k + rk2 l2k + ... + rkn lnk • Participation Factor pki = rki lik • pki tells the extent of machine k's participation in mode i
Linearizing a System • Taylor series for a function, g(x) • gTS(x) = 1[dg/dx](x-xo) + (1/2)[d2g/dx2] (x-xo)2 + (1/6)[d3g/dx3] (x-xo)3 + …
Use Matrix Form • Dx’ = F(x) • Dx’ = F1(Dx) + F2(Dx) + F3(Dx) + ...Dx’ = A Dx + F2(Dx) + F3(Dx) + ... • Truncating the series and taking only the linear terms yields the familiar formDx’ = A Dx