Download
1 / 25
280 likes | 700 Views
Tehni čka škola Smederevo. Nastavni predmet : Mehanika. Tema : Ravno kretanje krutog tela. Odeljenje : 2 17 tehničar drumskog saobraćaja.

E N D
Tehnička škola Smederevo Nastavni predmet : Mehanika Tema : Ravno kretanje krutog tela Odeljenje: 2 17tehničar drumskog saobraćaja Autor : Verica Petrović Manić dipl.maš.inž.
RAVNO KRETANJE KRUTOG TELA
1.JEDNAČINA KRETANJA RAVNOG KRUTOG TELA 2.TRENUTNI POL BRZINE
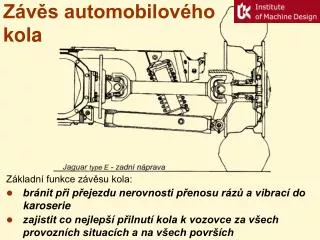
1.Jednačina kretanja krutog tela Ravno kretanje krutog tela je takvo kretanje pri kome se sve tačke tela krećuparalelno prema nekoj nepokretnoj ravni, odnosno kada su vektori brzina svihtačaka tela paralelni prema nepomičnoj ravni. z z IIx y B . A . y x (xB - xA ) 2 + (y B - y A ) 2= d 2
Ravno kretanje krutog tela određeno je sa 3 nezavisna parametra: 2 translacije duž osa X i Y i jedne rotacije oko ose upravne na ravan preseka. Jednačina kretanja ravnog krutog tela x= f 1(t) ,y = f 2(t) ,z = f 3(t)
Primeri ravnog kretanja krutih tela: Motorni mehanizam Kinematska šema
Određivanje brzina tačaka tela koje vrše ravno kretanje : Analitičke metode: 1.Vektorska metoda 2.Metoda projekcija brzina 3.Metoda trenutnog pola Grafičke metode : 1.Plan brzina 2.Okrenutih brzina
2.Trenutni pol brzine Ravno kretanje krutog tela sastoji se iz dva osnovna kretanja: translatornog i obrtnogkretanja oko ose koja prolazi kroz proizvoljno izabrani pol u ravni figure S, a upravnaje na tu ravnan. Posmatramo položaje ravnog preseka S u trenucima vremena t0, t1 : Tačka A je pol. -translacija u A 1 -rotacija u A 2
Teorema: Prevođenje figure S iz položaja u trenutku t0 u položaj u trenutku t1, a zatim u položaj određen trenutkom t2, može se izvesti i konačnim čistim obrtanjima. B1 P -pol rotacije A1 Svako konačno pomeranje ravne figure može se ostvariti jednim obrtanjem oko ose upravne na osnovnu ravan. P
Svojstva trenutnog pola brzine: Trenutni pol rotacije je tačka oko koje se do tog trenutka telo obrće (stalno se menja). 1.Brzina trenutnog pola jednaka je nuli. 2.Trenutni pol brzine se nalazi na pravoj povučenoj u tački upravno nanjenu brzinu. 3.Brzina tačke ravne figure jednaka je proizvodu trenutne ugaone brzinei rastojanja tačke do trenutnog pola brzine. V A = AP Ova tri svojstva daju pet mogućnosti za određivanje položaja trenutnog pola brzine ravne figure:
1.Poznata je trenutna ugaona brzina i brzina V A proizvoljne tačke A ravne figure. Trenutni pol se nalazi na polupravoj AP,dobijenoj obrtanjem vektora V A za 90 o u smeru ugaone brzine na rastojanju AP = P V A 90 O A
2.Poznati su pravci brzina dveju tačaka ravne figure. Trenutni pol se nalazi u preseku normala povučenih u tačkama A i B na pravce vektora ovih brzina. V A B A 900 V A = AP V B = BP 90 0 V B P
3.a)Vektori brzina dveju tačaka ravne figure među- sobno su paralelni ,istog smera a različitog intenziteta. A V A B V B P b.Vektori brzina dveju tačaka ravne figure međusobno su paralelni ,istog su smera i istog intenziteta. P je u A V A B V B
4.Vektori brzina dveju tačaka su paralelni, različitog intenziteta ,a suprotnog smera. A V A P V B B
5.Ravna figura se kotrlja bez klizanja po nepoktretnoj krivoj. Trenutni pol je dodirna tačka ravne figure i krive. B V B V A = AP V B =BP V C = CP V A C V C A P AP = R V A AP BP = 2 R CP = R V B BP V C CP
Zaključak: -Sa naučenim načinom određivanja brzina tačaka kod ravnog kretanja lakše ćemo shvatiti principe rada mehanizama (klipni mehanizam,kulisni mehanizam i bregasti mehanizm. -Pošto se položaj pola stalno menja ta tačka se zove trenutni pol P . -Brzina trenutnog pola je jednaka nuli. -Trenutni pol se nalazi na pravoj povučenoj u tački normalno na pravac njene brzine. - Brzina tačke jednaka je proizvodu trenutne ugaone brzine i rastojanja tačke do trenutnog pola.
Domaći zadatak: Štap AB = 4 m je oslonjen o dva nepokretna zida pod uglom od 60 0 . U datom položaju brzina tačke V A = 8 m/s. Odrediti ugaonu brzinu štapa AB i brzinu tačke B. AB
nalegla B AP P = cos 30 o= hipotenuza AB 300 BP naspramna = sin 30 0 = AB A hipotenuza = V A= AP V B= BP