Download
1 / 1
10 likes | 84 Views
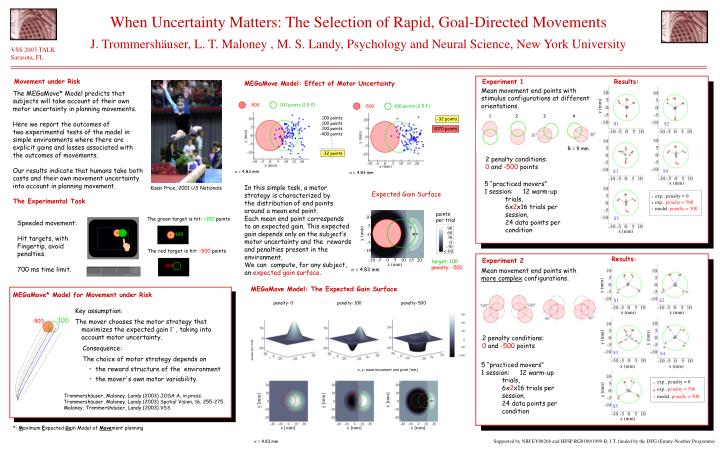
: -500. : -500. : 100 points (2.5 ¢). : 100 points (2.5 ¢). exp., penalty = 0. 1. 2. 3. 4. model, penalty = 500. x. 10. 5. -0. -5. -10. -10. -5. 0. 5. 10. 15. 20. R = 9 mm. When Uncertainty Matters: The Selection of Rapid, Goal-Directed Movements

E N D
: -500 : -500 : 100 points (2.5 ¢) : 100 points (2.5 ¢) exp., penalty = 0 1 2 3 4 model, penalty = 500 x 10 5 -0 -5 -10 -10 -5 0 5 10 15 20 R = 9 mm When Uncertainty Matters: The Selection of Rapid, Goal-Directed Movements J. Trommershäuser, L. T. Maloney , M. S. Landy, Psychology and Neural Science, New York University VSS 2003 TALK Sarasota, FL Movement under Risk Experiment 1 Results: MEGaMove Model: Effect of Motor Uncertainty Mean movement end points with stimulus configurations at different orientations. The MEGaMove* Model predicts that subjects will take account of their own motor uncertainty in planning movements. Here we report the outcomes of two experimental tests of the model in simple environments where there are explicit gains and losses associated with the outcomes of movements. Our results indicate that humans take both costs and their own movement uncertainty into account in planning movement. y (mm) 100 points -32 points S1 S2 100 points 100 points 3070 points -400 points y (mm) y (mm) . . . . -32 points 2 penalty conditions: 0 and -500 points x (mm) x (mm) S4 S3 = 4.83 mm = 4.83 mm x (mm) 5 “practiced movers” 1 session: 12 warm-up trials, 6x2x16 trials per session, 24 data points per condition In this simple task, a motor strategy is characterized by the distribution of end points around a mean end point. Each mean end point corresponds to an expected gain. This expected gain depends only on the subject’s motor uncertainty and the rewards and penalties present in the environment. We can compute, for any subject, an expected gain surface. Kassi Price, 2001 US Nationals Expected Gain Surface exp., penalty = 0 The Experimental Task exp., penalty = 500 model, penalty = 500 x points per trial S5 The green target is hit: +100 points Speeded movement: Hit targets, with Fingertip, avoid penalties. 700 ms time limit. 90 x (mm) 60 100 y (mm) 100 30 L 0 -30 The red target is hit: -500 points <-60 Results: Experiment 2 target: 100 penalty: -500 x (mm) -500 = 4.83 mm Mean movement end points with more complex configurations. y (mm) MEGaMove Model: The Expected Gain Surface MEGaMove* Model for Movement under Risk S1 S2 penalty: 0 penalty: 100 penalty: 500 Key assumption: The mover chooses the motor strategy that maximizes the expected gain , taking into account motor uncertainty. x (mm) x (mm) 90 100 -500 60 30 2 penalty conditions: 0 and -500 points y (mm) y (mm) 0 • Consequence: • The choice of motor strategy dependson • the reward structure of the environment • the mover's own motor variability. -30 points per trial S3 S4 <-60 y x y x y x 5 “practiced movers” 1 session: 12 warm-up trials, 6x2x16 trials per session, 24 data points per condition x (mm) x (mm) x, y: mean movement end point [mm] exp., penalty = 500 y (mm) Trommershäuser, Maloney, Landy (2003) JOSA A, in press. Trommershäuser, Maloney, Landy (2003) Spatial Vision, 16, 255-275. Maloney, Trommershäuser, Landy (2003) VSS y [mm] y [mm] y [mm] S5 x (mm) x [mm] x [mm] x [mm] *: Maximum Expected Gain Model of Movement planning Supported by NIH EY08266 and HFSP RG0109/1999-B, J.T. funded by the DFG (Emmy-Noether Programm) = 4.83 mm