Download
1 / 9
90 likes | 193 Views
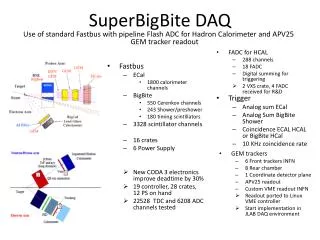
LAL,LLR,LPC,PICM VFE, PCB, mechanics , DAQ , Assembling , amorphous silicon Imperial College, UCL, Cambridge , Birmingham, Manchester, RAL DAQ , Physics studies ITEP,IHEP,MSU T ungsten , Silicon wafers Prague (IOP-ASCR) Silicon wafers SNU, KNU DAQ , PCB, Physics.

E N D
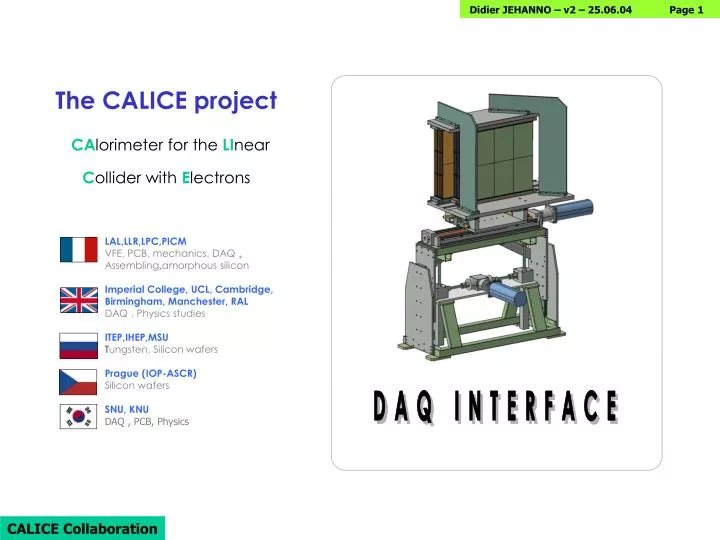
LAL,LLR,LPC,PICM VFE, PCB, mechanics, DAQ , Assembling,amorphous silicon Imperial College, UCL, Cambridge, Birmingham, Manchester, RAL DAQ , Physics studies ITEP,IHEP,MSU Tungsten, Silicon wafers Prague (IOP-ASCR) Silicon wafers SNU, KNU DAQ , PCB, Physics The CALICE project CAlorimeter for the LInear Collider with Electrons DAQ INTERFACE DAQ INTERFACE
SUMMARY Page 3 GENERAL SYNOPTIC : REMOTE CONTROL Page 4 GENERAL SYNOPTIC : LOCAL CONTROL CASE 1 Page 5 GENERAL SYNOPTIC : LOCAL CONTROL CASE 2 Page 6 DAQ EQUIPMENT CONNECTION Page 7 LAL POLICY Page 8 SUGGESTED DATAS Page 9 SUGGESTED COMMANDS
GENERAL SYNOPTIC : REMOTE CONTROL CONTROL ROOM ECAL Motor X COMMAND BOX Laptop Windows INTERFACE RS422 (Differential) 30m R232 MAIN AC 115V / 230V MAIN AC 115V / 230V Motor Y • - The COMMAND BOX drives the 2 stepper motors for X/Y movements • The remote LAPTOP, via the 232/422 INTERFACE, is connected to the COMMAND BOX with the RS422 LINK • It sends « LEVEL-1 commands » (ASCII) to the COMMAND BOX (left/right moves, reading position, etc…)
GENERAL SYNOPTIC : LOCAL CONTROL CASE 1 : WITH LAPTOP CONTROL ROOM Laptop Windows Motor X COMMAND BOX INTERFACE RS422 (Differential) X R232 30m disconnected MAIN AC 115V / 230V MAIN AC 115V / 230V Motor Y - The RS22 LINK has been disconnected from the COMMAND BOX - The LAPTOP, which has been moved LOCALLY, is now connected to the SAME connector dedicated for the RS442 LINK - The SAME functionalities as REMOTELY are available
GENERAL SYNOPTIC : LOCAL CONTROL CASE 2 CONTROL ROOM CASE 2 : WITH CONSOLE Motor X COMMAND BOX Laptop Windows INTERFACE RS422 (Differential) R232 30m MAIN AC 115V / 230V Motor Y MAIN AC 115V / 230V LOCAL CONSOLE • - The LOCAL CONSOLE has been connected to the COMMAND BOX • There is a LOCAL MODE switch (inhibits the LAPTOP commands) + a BRAKE OFF Switch (isolates the BRAKE) • - For each motor, there are 3 basic commands (PUSH Buttons) : Forward, Backward, ZERO position, plus 1 SPARE
DAQ EQUIPMENT CONNECTION Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY • - The purpose is to DEFINE, then SPECIFY the LINK between the LAL and the DAQ systems • QUESTIONS : • which datas are required by the DAQ ? • which period of refreshment ? Cyclic, event ? On DAQ request ? • which medium is the best choice ? • Serial (baudrate ? RS232, RS422 ? Protocol ?) • Ethernet (10/100M ? Protocol ? Client/Server architecture ? ) • …
LAL POLICY Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY - WHAT THE LAL SYSTEM PROVIDES WITH THE LAPTOP : LEVEL-1 commands (password required) : the lowest existing level ( ie frame level) LEVEL-2 set of instructions : for remote requests/commands dedicated for DAQ Graphical HMI for X/Y positions, status of the Motors, etc… - WHAT THE DAQ WILL NOT HAVE : no possibility to drive the motors via Level-1 commands : for safety reasons the only entry point for the DAQ system will be LEVEL-2 no access to the RS422 medium : for layer abstraction, required if control box changes no shared RS422 medium no possibility to adjust move speed for any axis : for safety reasons - WHAT THE LAL SYSTEM PROVIDES TO THE DAQ SYSTEM : LEVEL-2 set of instructions which are parsed and validated before sending them to the Control Box
SUGGESTED DATAS Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY • LAL PROPOSES THE FOLLOWING DATA FOR EACH AXIS , provided at LEVEL-2 : • the DAQ system has access to them, but it is up to it to use them or not • PARAMETERS(constants) : • conversion (one Motor Step) / distance (mm) • maximum moves allowed in (mm) and (step) (X : 30cm and Y : 20cm) • preset speed for translation • VARIABLES : • current position • current gaps between current position and maximum move allowed • global status : motor health status / stepper driver status • end position sensors status • OTHER VARIABLES : • console presence status • console switches status : « Local Mode » / Y « brake off » switch / Y brake status • console push-buttons status : Forward / Backward / Zero / Spare
SUGGESTED COMMANDS Laptop Windows X To Be Defined RS422 ??? R232 Y AC AC DAQ SYSTEM LAL SCOPE OF SUPPLY • LAL PROPOSES THE FOLLOWING COMMANDS, provided at LEVEL-2 : • May change further ! • READ PARAMETERS : rp [x/y] read all parameters for X or Y axis • READ VARIABLES : rv [x/y] read all variables for X or Y axis • MOVE AXIS : mv [x/y] [value] [unit] for X or Y axis,value is according theunit : step or µm / mm / cm • MOVE ZERO AXIS X : ze [x/y] returns to reference position 0 for X or Y axis • Y BRAKE COMMAND : bky [on/off] on validates the Y brake / off inhibits it, even if Y motor is stopped • POWER MOTOR X : pox [on/off] on validates hold torque / off validates detent torque when stopped • POWER MOTOR Y : poy [on/off] on validates hold torque / off validates detent torque when stopped