Download
1 / 53
530 likes | 923 Views
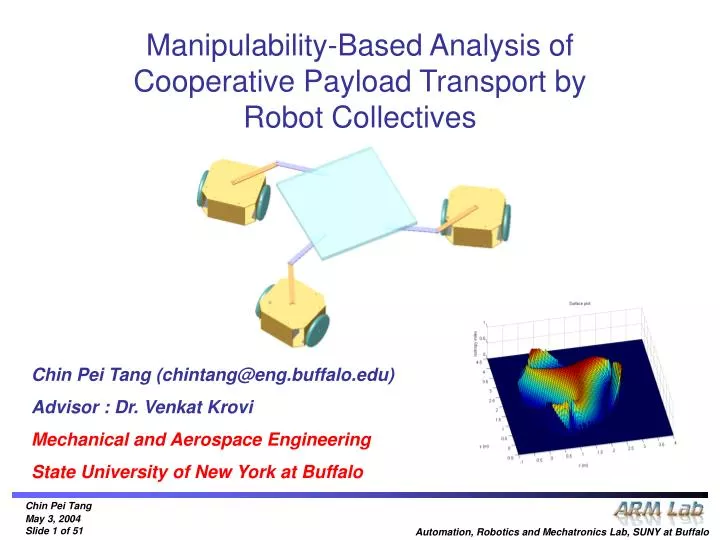
Manipulability-Based Analysis of Cooperative Payload Transport by Robot Collectives. Chin Pei Tang (chintang@eng.buffalo.edu) Advisor : Dr. Venkat Krovi Mechanical and Aerospace Engineering State University of New York at Buffalo. Part I. Part II. Agenda. Motivation & Our System

E N D
Manipulability-Based Analysis of Cooperative Payload Transport by Robot Collectives Chin Pei Tang (chintang@eng.buffalo.edu) Advisor : Dr. Venkat Krovi Mechanical and Aerospace Engineering State University of New York at Buffalo
Part I Part II Agenda • Motivation & Our System • Literature Survey & Research Issues • Kinematic Model • Twist-Distribution Analysis • Manipulability • Cooperative Systems • Conclusion & Future Work
Motivation • Why Cooperation? • Tasks are too complex • Distinct benefits – “Two hands are better than one” • Instead of building a single all-powerful system, build multiple simpler systems • Motivated by the biological communities Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Our System • Flexible, scalable and modular framework for cooperative payload transport • Autonomous wheeled mobile manipulator • Differentially-driven wheeled mobile robots (DD-WMR) • Multi-link manipulator mounted on the top Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Features Accommodate changes in the relative configuration Using the compliant linkage Detect relative configuration changes Using sensed articulation Compensate for external disturbances Using redundant actuation of the bases Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Research Issues • Challenges • Nonholonomic (wheel) / holonomic (closed-loop) constraints • Mobility / workspace increased (but also increases redundancy) • Mixture of active/passive components Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Literature Survey • Applications of Robot Collectives • Collective foraging, map-building and reconnaissance • Coordination & Control • Formation Paradigm • Leader-follower [Desai et. al., 2001] • Virtual structures [Lewis and Tan, 1997] • Mixture of approaches [Leonard and Fiorelli, 2001], [Lawton, Beard and Young, 2003] No physical interaction Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Literature Survey • Physical Interaction • Teams of simple robots • box pushing [Stilwell and Bay, 1993], [Donald et. al., 1997] • caging [Pereira et. al., 2002], [Wang & Kumar, 2002] • Teams of mobile manipulators [Khatib et. al., 1996] • Design modifications [Kosuge et. al., 1998], [Humberstone & Smith, 2000] Upenn MARS Univ. of Alberta CRIP NASA Cooperative Rovers Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Literature Survey • Performance Measures • Single agent • Service angle [Vinogradov et. al, 1971], conditioning [Yang and Lai, 1985], manipulability [Yoshikawa, 1985], singularity [Gosselin and Angeles, 1990], dexterity [Kumar and Waldron, 1981], etc. • Multiple agents (Robot teams) • Social entropy – Measuring diversity of robots in a team (Information-theoretic) [Balch, 2000] • Kinetic energy – Left-invariant Riemannian metrics [Bhatt et. al., 2004] • Manipulability • Serial chain – Yoshikawa’s measure [Yoshikawa, 1985], condition number [Craig and Salisbury, 1982], isotropy index [Zanganeh and Angeles, 1997] • Closed chain [Bicchi and Prattichizza, 2000], [Wen and Wilfinger, 1999] Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Research Issues • Part I – Physical Cooperation • System level constraints • Motion planning strategy • Part II – Performance Evaluation & Optimization • Performance measures • Formulation that takes holonomic/nonholonomic constraints and active/passive joints into account • Different actuation schemes • Optimal configuration Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Mathematical Preliminaries Homogeneous Matrix Representation Body-fixed Twist Similarity Transformation Twist Matrix TwistVector Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Mobile Platform Kinematic Model Reaching any point in the plane Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Nonholonomic Constraints Kinematic Model Mobile Platform Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Nonholonomic Constraints Kinematic Model Mobile Platform Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Kinematic Model Mobile Platform Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Kinematic Model Manipulator Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Kinematic Model Manipulator Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Assembled Jacobian Kinematic Model Twist Vectors Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Mobility Verification • Verify that arbitrary end-effector motion is feasible. • Partitioning of feasible motion distribution: • Actively-realizable (using wheeled bases) • Passively-accommodating (using articulations) • Configuration dependent partitioning • Steer the actively-realizable vector-fields Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Passive Distributions Active Distributions Twist-Distribution Analysis Partition the Jacobian Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Feasibility check Alternate constructive approach Reciprocal Wrench Twist-Distribution Analysis Can any arbitrary twist be realized using only the active distribution? Not constructive Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
0 Twist-Distribution Analysis Given arbitrary twist Condition: To understand this condition better: Transform an arbitrary twist from {Ek} to {M}: Achieved by aligning the forward travel direction with the direction of the velocity The Motion Planning Strategy Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Manipulability • Jacobian Matrix Joint manipulation rates space Task velocity space Manipulability is defined as the measure of the flexibility of the manipulator to transmit the end-effector motion in response to a unit norm motion of the rates of the active joints in the system Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Manipulability – SVD • Singular Value Decomposition Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
RR Manipulator Example Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Manipulability Indices • Yoshikawa’s Measure (Volume of Ellipsoid) • Condition Number • Isotropy Index Not able to distinguish the ratio of major/minor axes of ellipsoid Value goes out of bound at singular position Better numerical behavior Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
RR Manipulator Example Yoshikawa’s Measure Condition Number Adopted measure Isotropy Index Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Manipulability (Closed-Loop) Generalized Coordinates Forward Kinematic Closed-Loop Kinematic Constraints Not easy to compute Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Manipulability (Closed-Loop) Partition according to active/passive manipulation variable rates Exact Actuation Redundant Actuation Manipulability Jacobian Solved explicitly Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Cooperative Model Team up End-effectors need to be re-aligned Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Kinematic Model (with end-effector offset angle) Similarity Transformation Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Simulation • Step 1: Identify • Step 2: Construct manipulability Jacobian • Step 3: Compute isotropy index • Case I – MB static, R1 actuated • Case II – MB static, R2 actuated • Case III – MB moves, R1 & R2 passive • Case IV – MB moves, R1 locked • Case V – MB moves, R2 locked Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Simulation Parameters (3-RRR Nomenclature) Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case I: MB static R1 actuated Generalized Coordinates Forward Kinematics General Constraints Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case Study I-A Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case Study I-B Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case II: MB static, R2 actuated Generalized Coordinates Forward Kinematics General Constraints Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case II: MB static, R2 actuated Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case III: MB moves, R1 and R2 passive Generalized Coordinates Forward Kinematics General Constraints Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Self-Motion Feasible motions of passive joints due to the actuations but not violating constraints Feasible self-motion when all the active joints locked Underconstrained Lock this number of joints Dimension of self-motion manifold Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Self-Motion Lock this number of joints • 2 Cases: • Locking R1 • Locking R2 Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case IV: MB moves, R1 locked Generalized Coordinates Forward Kinematics General Constraints Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case IV: MB moves, R1 locked Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case V: MB moves, R2 locked Generalized Coordinates Forward Kinematics General Constraints Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Case V: MB moves, R2 locked Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Subject to: Closed-Kinematic Loop Constraints Case Study – Configuration Optimization Constrained Optimization Problem Unconstrained Optimization Problem Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Configuration Optimization – Case IV Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Configuration Optimization – Case V Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Conclusion • Modular Formulation • Motion-Distribution Analysis • Evaluation of Performance Measures • Manipulability Jacobian Matrix Formulation • Effect of Different Actuation Schemes • Optimal Configuration Determination Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion
Future Work • Global Manipulability • Force Manipulability • Singularity Analysis • Decentralized Control • Redundant Actuation Introduction Model Distribution Analysis Manipulability Cooperative System Conclusion