Download
1 / 1
10 likes | 335 Views
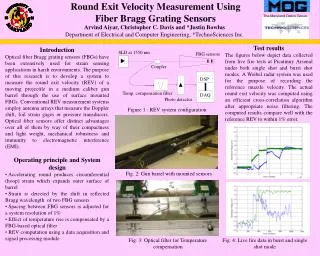
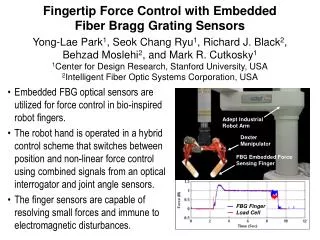
Force Sensing Robot Fingers using Embedded Fiber Bragg Grating Sensors and Shape Deposition Manufacturing. Yong-Lae Park 1 , Kelvin Chau 2 , Richard J. Black 2 , and Mark R. Cutkosky 1 1 Center for Design Research, Stanford University, USA

E N D
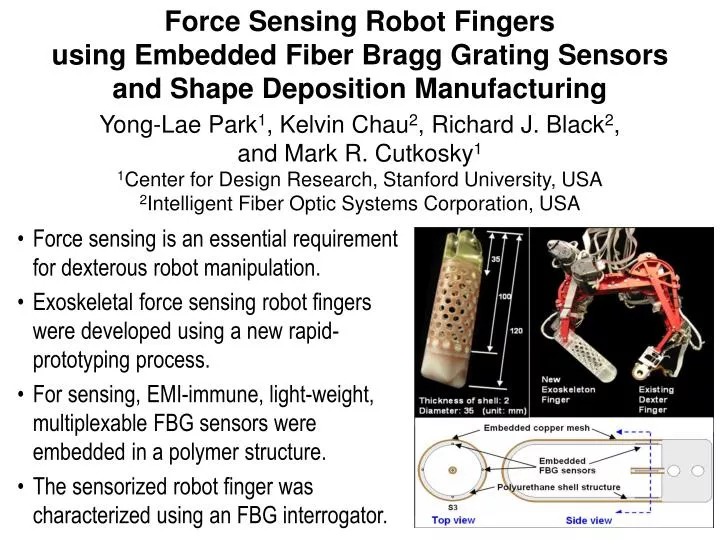
Force Sensing Robot Fingers using Embedded Fiber Bragg Grating Sensors and Shape Deposition Manufacturing Yong-Lae Park1, Kelvin Chau2, Richard J. Black2, and Mark R. Cutkosky1 1Center for Design Research, Stanford University, USA 2Intelligent Fiber Optic Systems Corporation, USA • Force sensing is an essential requirement for dexterous robot manipulation. • Exoskeletal force sensing robot fingers were developed using a new rapid-prototyping process. • For sensing, EMI-immune, light-weight, multiplexable FBG sensors were embedded in a polymer structure. • The sensorized robot finger was characterized using an FBG interrogator.