Download
1 / 1
20 likes | 260 Views
FBG Finger Load Cell. Fingertip Force Control with Embedded Fiber Bragg Grating Sensors. Yong-Lae Park 1 , Seok Chang Ryu 1 , Richard J. Black 2 , Behzad Moslehi 2 , and Mark R. Cutkosky 1 1 Center for Design Research, Stanford University, USA

E N D
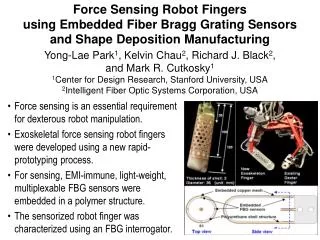
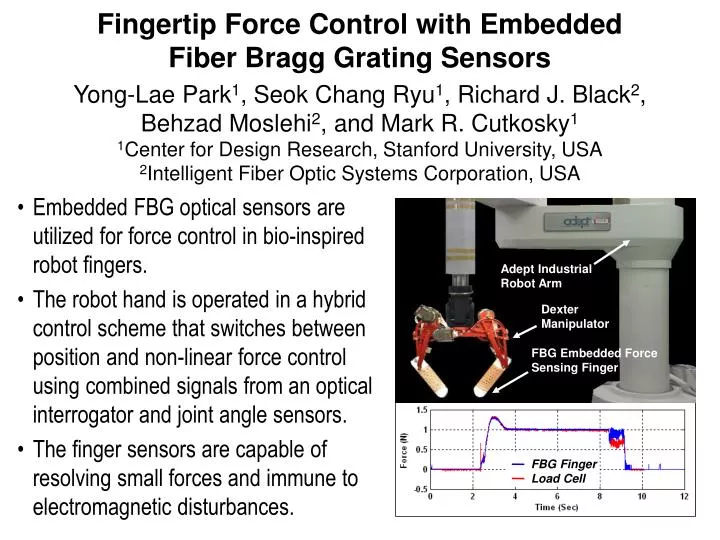
FBG Finger Load Cell Fingertip Force Control with Embedded Fiber Bragg Grating Sensors Yong-Lae Park1, Seok Chang Ryu1, Richard J. Black2, Behzad Moslehi2, and Mark R. Cutkosky1 1Center for Design Research, Stanford University, USA 2Intelligent Fiber Optic Systems Corporation, USA • Embedded FBG optical sensors are utilized for force control in bio-inspired robot fingers. • The robot hand is operated in a hybrid control scheme that switches between position and non-linear force control using combined signals from an optical interrogator and joint angle sensors. • The finger sensors are capable of resolving small forces and immune to electromagnetic disturbances. Adept Industrial Robot Arm Dexter Manipulator FBG Embedded Force Sensing Finger