Download
1 / 30
340 likes | 1.11k Views
GLOBAL POSITIONING SYSTEM. GNSS – Global Navigation Satellite System US GPS System (Navstar) Russian GLONASS system European Galileo System. GPS SYSTEM COMPONENTS. (Fully operational since 1993) The Space Segment 24 satellites in six near circular orbits orbits

E N D
GLOBALPOSITIONING SYSTEM • GNSS – Global Navigation Satellite System • US GPS System (Navstar) • Russian GLONASS system • European Galileo System
GPS SYSTEM COMPONENTS • (Fully operational since 1993) • The Space Segment • 24 satellites in six near circular orbits orbits • 24 hour coverage anywhere on earth’s surface between Lat. 80°N and 80°S • Altitude approx. 20 200km • Orbital period approx. 12hrs (speed of satellites about 14000km/hr) • Satellites equipped with very precise (and expensive!) atomic clocks • Satellites transmit signals with extremely stable frequencies • The Control Segment • Five monitoring stations (Col. Springs, Hawaii, Ascension, Diego Garcia, Kwajaleni) • Satellites monitored and tracked at control stations • Data relayed to Master Control Station (Colorado Springs) • Orbital parameters and clock corrections computed and uploaded to satellites for transmission to system users (broadcast vs rapid (24 hrs) vs precise ephemeris (2wks)) • The User Segment • GPS receivers • Passive devices that record and analyze satellite signals for positioning • Various receiver types for different levels of accuracy and applications • Equipped with less precise (less expensive) clocks than satellites
CORE IGS TRACKING NETWORK – late 1998 Source: http://www.gmat.unsw.edu.au/snap/gps/gps_survey/chap12/1224.htm#fig1
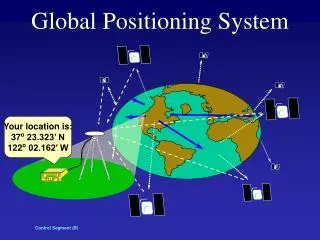
A THE GPS MEASUREMENT PRINCIPLE ·Based on the basic physical relationship: distance = velocity * time ·Observations (pseudo-ranges) from 4 satellites provide 3 dimensional position (3 positional and 1 time unknown) ·Coordinate system realized by the satellite orbits (ephemeris data) and by the coordinates and physical locations of the control and tracking stations Trilateration
A: Geodetic (carrier phase with resolved ambiguities), real-time/post-processed B: Carrier smoothed C/A Code Phase, post-processed C: Real-time (RTCM SC104), post-processed C/A Code D: Real time P-Code (Precise Positioning Service [PPS]) E: Real time C/A-Code (Standard Positioning Service [SPS]) GPS TECHNOLOGY CLASSIFICATION mapping geodetic navigation/ 100 m civilian (SPS) recreational grade grade (prior to 05/02/00) grade 20 m civilian (SPS) – post 05/02/00 APPROXIMATE ACCURACY 10 m military (PPS) 5 m 1 m 0.5 m dm cm mm E C A B D POINT (ABSOLUTE) RELATIVE POSITIONING POSITIONING Selective Availability switched off – see http://geography.about.com/library/weekly/aa050400a.htm
The Geocentric Cartesian Coordinate System Z Satellite P Greenwich Meridian N ZP A Y XP YP Equator S X AP = √(XP-XA)2 + (YP-YA)2 + (ZP-ZA)2
THE GPS SIGNALS • Each Satellite transmits two carrier waves • L1 - frequency of 1575.42 MHz and a wavelength of approx 19cm • L2 - frequency of 1227.60 MHz and a wavelength of approx 24cm • The following satellite-specific signals, called the pseudo random noise (PRN) codes are modulated on the carrier waves: • On L1: C/A (Coarse/Acquisition) code λ = approx 300m • - Accessible to civilian users • - Consists of a series of 1023 binary digits (called chips) that are unique to each satellite. • - The chip pattern is repeated every millisecond • P (precise) code λ = approx. 30m • - Accessible only to military equipment • On L2: P code only Coming on-line: L2C and L5
Code Signal Positioning Subframe of message Receiver Signal TimeDelay Matching Subframe DelayedSatellite Signal The ‘mis-match’ between the code patterns is a measure of the time the signal has taken to travel from satellite to receiver.
Geometric Dilution of Precision - Measures the effect of geometry on the precision of the observations - Multiply GDOP by the Std Error to get actual uncertainty - Also HDOP, VDOP Position Dilution of Precision (PDOP) - This is positional part of GDOP
COMMON MISTAKES • Logistical weaknesses • battery power, memory overruns, no inter-party communications, no • contingencies in observation schedule • Operator mistakes • incorrect antenna heights, careless centering, incorrect receiver settings • (epoch interval), accidental deletion of raw observations, inadequate field • records, careless handling of antenna and power cables • Processing mistakes • insufficient or incorrect datum definition (e.g. incorrect base station • coords), no checks on centering and antenna heights, inclusion of trivial • base lines, insufficient redundancy and quality checks
Precautions to minimize errors • Schedule your survey to fall within periods of good satellite geometry (i.e. low PDOP) • Eliminate satellites at low elevation to reduce the length of the signal path through the atmosphere • Avoid multi-path conditions near the GPS antenna • For precise positioning use differential corrections and/or phase observations of the carrier waves 15° (Mask Angle) Earth Atmosphere Multipathing
Base Stations Connected via cable Tirana, Albania Antenna on Tripod Receiver and Laptop logging base station measurements Base Station over Known Point – Cajamarca, Peru
Differential GPS (Static) Single Differencing: One satellite observed from two receivers Satellite clock error is eliminated Double Differencing: Two satellites observed from two receivers Receiver clock error is eliminated Triple Differencing: Two satellites observed from two receivers at two different epochs. Eliminates integer cycle ambiguity Epoch 2 Epoch 1
Real Time Kinematic (RTK) Differential corrections are broadcast via radio Base station over free point Base station over known point Data latency = 0.05 – 1.0 secs Radio limits range between base and rover
THIRD PARTY DIFFERENTIAL CORRECTION SERVICE • Service available commercially (e.g. Omnistar) • Sub-meter accuracies possible when used in combination with L1 • User needs only one receiver GPS satellites Geostationary Communication Satellite Differential Base Station Rover Footprint of Communication Satellite coverage See http://www.omnistar.com/
Eccentric Points Geostationary Communication Satellite Useful when Canopy prevents direct occupation of point or when Communication Satellite is blocked
STATIC SURVEYS FOR CONTROL NETWORK IN NAMIBIA Source: Walter Volkmann
Fiducial Points for defining GPS datum in the country
Field testing rapid GPS cadastral surveying methodology - Peru
Testing GPS methodology for surveying rural properties - Nicaragua