Download

1 / 8
0 likes | 11 Views
This paper focuses on the development and implementation of Speed-Distance Braking in Autonomous Vehicles (SDBAV) utilizing MATLAB/SIMULINK. The study involves the creation of a plant model and control logic to comprehend the system's functionality. Through extensive data collection and simulation, the model can process input data, then simulate and provide results based on the vehicle behavior on the road. Emphasizing driver safety, the SDBAV offers informed detection of unsafe conditions and knowledge-driven decision-making during hazardous situations.

E N D
Speed-Distance Braking in Autonomous Vehicles(SDBAV) Mukhtar Oudeif, Liyon Jabbo ECE 560 Modern Control Theory ABSTRACT This paper focuses on the development and implementation of Speed-Distance Braking in Autonomous Vehicles (SDBAV) utilizing MATLAB/SIMULINK. The study involves the creation of a plant model and control logic to comprehend the system's functionality. Through extensive data collection and simulation, the model can process input data, then simulate and provide results based on the vehicle behavior on the road. Emphasizing driver safety, the SDBAV offers informed detection of unsafe conditions and knowledge-driven decision-making during hazardous situations. The system uses speed and range to calculate the estimated time to collision with an object then swiftly reacts by applying the appropriate brake pressure depending on the time to collision. This helps the vehicle slow down or completely stop depending on how far the collision object is from the vehicle. The system also has the capability to support the driver in emergencies by applying full brakes when an object suddenly appears in front of the vehicle at a time to collision of 1 second. Our SDBAV system also includes an alert to grab the attention of the driver to intervene when necessary. The SDBAV is simulated using the 2-second rule for the first brake stage. This ensures that the vehicle maintains a 2-second time to collision between our vehicle and the collision object when the first light brake is applied. Afterwards, the system applies a greater brake pressure to dramatically slow down or stop the vehicle at less than 1 second from the collision object. The alert system uses the same data fed into the SDBAV. The system makes three sounds. The first sound is to alert the driver when the first light brake is applied. The second sound is to alert the driver when the second light brake is applied. Finally, a louder sound is generated when the full brake is applied. The overall system resulted in the timely application of brake pressure based on the distance and speed. The simulation discussed in this paper shows the brake pressure applied based on the input data collected from the sensors. This research contributes to the evolving field of autonomous vehicles, offering important insights for future advancements in autonomous braking technology. INTRODUCTION The majority of vehicles nowadays are equipped with Autonomous Emergency Braking Systems, also known as Collision Avoidance Systems, which are safety features designed to avoid or mitigate collisions. This system operates independently of the driver, using sensors and advanced technologies to detect an imminent collision and take corrective actions. The primary goal of the SDBAV system is to enhance overall vehicle safety by preventing or reducing the severity of collisions. Adding this feature helps in preventing and reducing the severity of collisions. This technology is a crucial component of modern advanced driver assistance systems (ADAS) and is increasingly becoming a standard feature in many vehicles to meet safety regulations and improve road safety [6]. This system operates independently of the driver, using Long Range Radar (LRR) sensors and advanced technologies to gather the speed and range data then feed it into a system that calculates the time to collision (TTC) to apply the correct braking option to avoid imminent collision. The SDBAV uses radar technology to detect vehicles close to the designed vehicle and warns the driver of danger with an alert sound as shown in Figure 2. The SDBAV system has features including time-to-collision prediction, a brake feature at three stages, an Emergency Braking Feature, and an alert feature as shown in figure 3. The SDBAV system continuously analyzes data from the sensors to detect potential collisions with obstacles, vehicles, or pedestrians. When the driver does not respond promptly to the warnings, the SDBAV system can autonomously apply the brakes to avoid or mitigate the impact [4]. The level of intervention may vary depending on the speed of the vehicle and the distance from the collision object, ranging from partial braking to full emergency braking. The SDBAV system has the following features: - Chime Alert Feature – The system will detect a closed vehicle and provide multiple chime alerts to the driver as the vehicle approaches the close vehicle at different stages. Automatic Brake feature – To assist the driver in slowing the vehicle down when -
needed by applying the appropriate brake pressure Emergency Brake Feature – In emergency braking scenarios, drivers may not always press the brake pedal with enough force to achieve the shortest possible stopping distance as shown in Figure 3. Brake Assist detects rapid and hard pedal application, characteristic of emergency braking, and automatically increases braking force to help the driver decelerate more effectively within a short distance range. - Figure 2: SDBAV System Chime Alerts Overview [2] Figure 3: SDBAV Overview [8] Figure 4 illustrates the comprehensive control logic governing the flow of information and decision- making within the SDBAV system. At its core, the system relies on three primary inputs: data from the vehicle's sensors and systems, input from the driver, and information gathered from radar sensors for environmental assessment. These inputs undergo meticulous processing through several stages within the process module. Initially, the data is subjected to rigorous analysis and filtering through Input Signal Processing to extract pertinent information crucial for the braking system's operation. Subsequently, the Diagnostics phase conducts thorough checks on the functionality and health of system components and sensors. The Enable/Disable Logic step evaluates various factors, such as system integrity and driver preferences, to determine the SDBAV's activation status. Finally, the Brake Application Decision stage employs sophisticated algorithms to autonomously decide whether braking intervention is necessary. The resultant control signal, representing the SDBAV output, dictates the behavior of the vehicle's braking system. This structured approach ensures optimal safety and efficiency in braking maneuvers. For a visual representation of this process refer to Figure 4. This control logic serves as a high-level overview, and the actual implementation may involve more detailed algorithms, safety checks, and integration Figure 1: SDBAV System Enable Control Logic Figure 1 outlines the decision-making process of the Programmable Logic Braking System during normal driving conditions. It checks the other vehicle range sensed by the Ultrasonic Sensors and takes appropriate actions based on the distance of the detected vehicle. In dry road conditions, if the targeted object has a distance larger than 70m from our vehicle, the solenoid valve is kept in the OFF position, indicating that braking will not occur. If the detected object is less than 70m from our vehicle, the solenoid valve is actuated, leading to the initiation of the braking process. If neither condition is met, the system continues with normal driving. The flow chart concludes at the "End" once the process is completed.
with the targeted object to ensure the safe and effective operation of the SDBAV. Figure 5: Plant Model of the SDBAV Methodology The system is set to collect inputs from the ultrasonic sensors to determine the correct sort of action that allows the vehicle to brake promptly. The vehicle will have three ultrasonic sensors to provide the input to the SDBAV module to make a braking decision. The long-range-radar sensors will be selected to offer a visibility of 70 to 120 meters allowing enough range to make a decisive decision on braking. Each sensor will cover a 60-degree visibility angle. The three sensors should offer a 180-degree visibility angle to cover the front half of the vehicle. The sensors gather the speed and range data and then feed this information into the SDBAV system to calculate a time to collision. The system determines the collision will occur. The System will issue a braking command to the brake controller within a specified Time To Collision (TTC) to decide which brake option needs to be applied. This option applies only if the driver doesn’t apply the brake on time. There are three braking options to apply in the SDBAV system. First, the system applies a first light brake at 300 psi brake pressure to slow the vehicle. Second, the system applies a second light brake at 500 psi to slow down the vehicle even further as we get close to the collision object. Finally, the system applies a full brake at 1000 psi to fully stop the vehicle when we reach a distance of 1.5m from the collision object. We are using the TTC formula to calculate the relative distance between our vehicle and the targeted object. TTC is a measure used in collision avoidance systems to estimate the time it will take for a vehicle to collide with another object. Figure 4: Control Logic of the SDBAV Figure 5 presents the plant model for the SDBAV, offering a comprehensive explanation of its components and functionality. Inputs to the SDBAV plant model are essential for decision-making and system operation, with Ultrasonic Sensors providing crucial information about surrounding vehicles and the Vehicle Status input offering real-time updates on the vehicle's condition. In the processing phase, various components contribute to SDBAV's operation. The Autonomous Vehicle Braking System (SDBAV) serves as the core processing unit, analyzing inputs and making critical decisions related to braking maneuvers. Simultaneously, Park Assist functionality aids in parking maneuvers, optimizing vehicle positioning in confined spaces, while the Collision Mitigation component actively intervenes to mitigate potential collisions, thereby enhancing safety. Outputs from the SDBAV plant model ensure effective communication with vehicle occupants and integration with the vehicle's braking system. The Human-Machine Interface (HMI) provides occupants with feedback regarding system status and alerts, facilitating situational awareness. The Electronic Brake Control Module (EBCM) establishes communication with the vehicle's braking system, enabling seamless coordination for braking interventions. Furthermore, a chime alert system notifies the driver of impending collisions, enhancing overall safety. Bidirectional communication channels between various system components ensure seamless integration and data exchange within the SDBAV plant model, enhancing its responsiveness and user- centric interface for vehicle occupants. ??????? ???????????? ?????? ?? ??? = The system uses sensors to detect the speed and distance between a vehicle and potential collision objects, calculates the time to collision (TTC) based on the provided data, and then adjusts the braking
pressure accordingly to mitigate or avoid collisions. Based on the calculated TTC, the system determines the appropriate braking pressure needed to slow down or stop the vehicle safely. This adjustment is crucial for maintaining a safe distance from potential collision objects. The aim is to develop a robust braking system that enhances vehicle safety by effectively mitigating collision risks based on real- time sensor data and TTC calculations. Additionally, simulating and testing the system under different weather conditions demonstrates a commitment to ensuring its reliability and effectiveness in diverse driving environments. The Simulink model shown in Figure 6 reflects the TTC equation. Figure 7: Brake Pressure Application based on TTC. Another logic added to the system is triggered in case of an emergency where the vehicle is driving at high speeds between 40m/s to 10m/s and a sudden object appears in front of the vehicle at a small collision distance (5m). The time to collision trigger activates in the case of TTC is equal to 1s. This logic allows our system to apply a full break in the case of high- speed/small-distance scenarios. The Simulink logic for emergency situations is shown in Figure 8. Figure 6: TTC Calculation Based on Speed and Distance The model then utilizes the TTC output from Figure 6 to apply the appropriate brake pressure. Figure 7 shows the logic behind the brake pressure application where the system applies a specific brake pressure depending on the TTC for dry weather conditions. If the TTC is between 2.35s to 2.4 the system applies the first light brake at 300psi to maintain the TTC at above 2.35s. As the TTC drops to a range of 1s to 2.35s, the system starts applying the second light brake at 500psi to further slow down the vehicle. Once the TTC drops below 1s, the system applies a full brake at 1000psi to stop the vehicle and avoid the collision. Figure 8: Emergency Brake Logic The alert system is designed to generate an alert sound that captures the attention of the in the case of an approaching collision scenario. The system makes three sounds. The first sound is to alert the driver when the first light brake is applied. The second sound is to alert the driver when the second light brake is applied. Finally, a louder is applied when the full brake is applied. The alert system is designed to grab the attention of the driver to engage in case of an approaching collision. The logic for the alert system is shown in Figure 9 where the system uses distance to generate the sound. If the distance is between 70m to 20m then the system generates a low sound indicating the first light brake is being applied. If the distance drops to a range of 20m to 5m, a second sound will be applied indicating the second light brake is being applied. Finally, if the distance drops below 5m, a louder sound will be generated
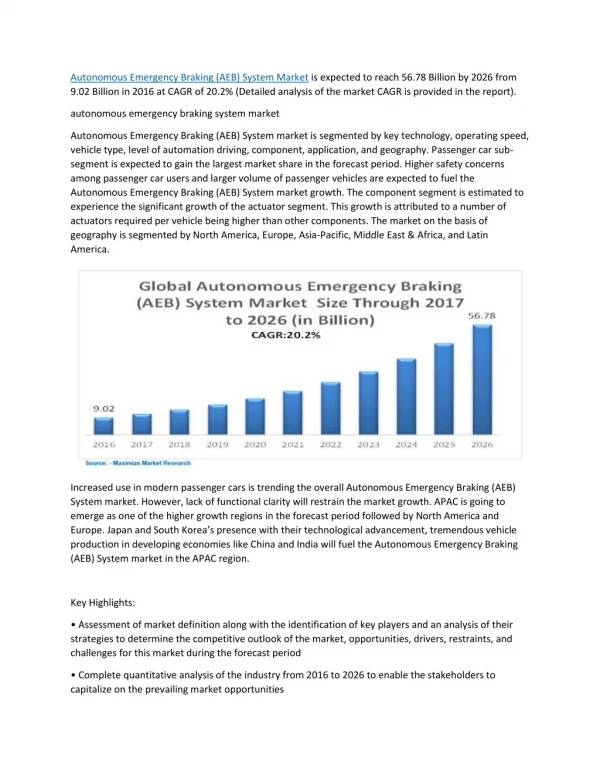
indicating the full brake is being applied to fully stop the vehicle. Design Failure Mode and Effects Analysis (DFMEA) In this section, we conducted a Design Failure Mode and Effects Analysis (DFMEA) to systematically evaluate potential failure modes in our design and their potential effects on the functionality, reliability, and safety of the product. Each component of our system design was identified along with its expected functions. Potential failure modes for each component were brainstormed and documented. These failure modes encompass any event or condition that could lead to deviation from expected performance. Each failure mode was assigned severity, occurrence, and detection ratings based on its potential impact, likelihood of occurrence, and detectability, respectively. Mitigation strategies were developed and implemented to address high-risk failure modes identified through the DFMEA process. The DFMEA process has provided valuable insights into potential failure modes within the design, enabling proactive risk mitigation and improvement of product reliability and safety. The DFMEA is shown in Figure 11. Figure 9: Alert System Simulink Logic CRASH STATISTICS AND FACTORS The NHTSA reports significant progress as 20 automakers voluntarily equip most new passenger vehicles with low-speed automatic emergency braking (AEB) by 2023. Some, like Audi and Tesla, have already surpassed expectations by installing AEB in all new vehicles three years early, while others, like Ford and Nissan, have equipped over 75% of their new vehicles with AEB. Deputy Administrator James Owens highlights AEB's role in crash prevention and praises manufacturers for swift adoption, noting that this voluntary approach has accelerated AEB deployment compared to regulations. This initiative is estimated to make AEB standard three years faster than regulatory processes would allow, with a notable increase in AEB- equipped vehicles despite challenges posed by the public health crisis [5]. Figure 10 shows the The percentage of new vehicles equipped with AEB. Figure 11: Design Failure Mode and Effects Analysis of the SDBAV Results We simulated two conditions to evaluate the system. The first condition included a vehicle driving on a dry road scenario and the second condition included driving on a rainy or wet road scenario. For the dry scenario, the safe distance to activate the SDBAV system was 70m [15]. For rainy conditions, the safe distance to activate the SDBAV system was 170m [15]. The data input into the Simulink model reflects these two scenarios. Figure 10: The percentage of new vehicles equipped with AEB [10] First, the dry condition is simulated assuming a vehicle driving at 30m/s. There are three braking
options to apply in the SDBAV system. First, the system applies a first light brake at 300 psi brake pressure to slow the vehicle. Second, the system applies a second light brake at 500 psi to slow down the vehicle even further as we get close to the collision object. Finally, a full brake at 1000 psi is applied to fully stop the vehicle when we reach a distance of 1.5m from the collision object. The simulation in Figure 12 shows the model results in the dry scenario. Figure 13: Wet Weather Scenario Simulation The emergency braking system is triggered in a case of an emergency where the vehicle is driving at high speeds between 40m/s to 10m/s and a sudden object appears in front of the vehicle at a small collision distance (5m). This logic allows our system to apply a full break in the case of high-speed/small-distance scenarios. The system does not depend on the weather conditions. It activates based on the speed of the vehicle and the time to collision trigger of 1s to apply full brake pressure to stop the vehicle. The simulation in Figure 14 shows the results of the emergency brake system. Figure 12: Dry Weather Scenario Simulation Second, the wet condition is simulated assuming a vehicle driving at 30m/s. The distance to activate the system is 170m for the scenario because a greater distance is required during wet conditions to avoid collisions. There are three braking options to apply in the SDBAV system. First, the system applies a first light brake at 300 psi brake pressure to slow the vehicle. Second, the system applies a second light brake at 500 psi to slow down the vehicle even further as we get close to the collision object. Finally, a full brake at 1000 psi is applied to fully stop the vehicle when we reach a distance of 1.5m from the collision object. The simulation in Figure 13 shows the model results in the wet scenario. Figure 14: Emergency Brake Simulation
Figure 15 shows the results of the alert system in dry conditions. The system makes three sounds. The first sound is to alert the driver when the first light brake is applied representing the zone1 of the chime alert. The second sound is to alert the driver when the second light brake is applied representing the zone2 of the chime alert. Finally, a louder sound is generated when the full brake is applied representing the zone3 of the chime alert. The chime alert will generate a similar logic under wet conditions except that it will start at 170m instead of 70m used in dry conditions. EBCM is commanded based on TTC calculations, engaging both the EBCM and the braking command as required. This structured approach ensures efficient data collection, processing, and action, ultimately enhancing vehicle safety through timely warnings and autonomous braking interventions. Conclusion Working on this project provided us with the knowledge to design autonomous vehicle systems and understand the logic that goes behind these systems. The SDBAV system was effectively designed, implemented, and executed with the specified results. Our SDBAV system provides a basic example of the braking systems currently being used by OEMs like GM, Nissan, and Mazda. The SDBAV system adds another level of protection from collisions and assists the driver to have a better driving experience, increases safety, and significantly decreases mischances with other vehicles collisions. With the increase of autonomous driving systems nowadays, each vehicle should have braking systems similar to our SDBAV system to provide an extra layer of protection, since the system's reaction time is faster than human reaction time on the road to avoid collisions. References Figure 15: Alert System Simulation in Dry Condition 1. Alsuwian, T., Saeed, R. B., & Amin, A. A. (2022, August 24). Autonomous vehicle with emergency braking algorithm based on multi-sensor fusion and Super Twisting Speed Controller. MDPI. https://www.mdpi.com/2076- 3417/12/17/8458 Automated driving toolbox. MATLAB. (n.d.). https://www.mathworks.com/products/auto mated-driving.html Overview of motor vehicle traffic crashes in 2021. (n.d.). https://crashstats.nhtsa.dot.gov/Api/Public/P ublication/813435 Adtrak.admin. (2022, November 28). Autonomous emergency braking: Adas guide. The Windscreen Company. https://www.thewindscreenco.co.uk/adas- guide/autonomous-emergency-braking-aeb/ Automated vehicles for safety. NHTSA. (n.d.). https://www.nhtsa.gov/vehicle- safety/automated-vehicles-safety Discussion The signal processing structure of an Advanced Vehicle Braking System (SDBAV) follows a structured approach across six levels. At Level 1, sensors attached to the vehicle gather data according to their specific functionalities. Level 2 involves collecting and transmitting all necessary data and information to the SDBAV controller for processing. Subsequently, at Level 3, the SDBAV system identifies the relevant vehicle as the high-threat object approaching the SDBAV Host vehicle. Upon detection of the high-threat object, Level 4 entails continuous monitoring of the system's basic operations. At Level 5, based on distance and Time To Collision (TTC) calculations, the SDBAV issues a sequence of chime alerts to warn the driver of a potential object in the vehicle's path and commands the Electronic Brake Control Module (EBCM) to issue a brake command to prepare the brakes for full engagement if necessary. Finally, at Level 6, the 2. 3. 4. 5.
6. Importance of object detection in Advanced Driver Assistance Systems. Importance of Object Detection in Advanced Driver Assistance Systems. (n.d.). https://www.augmentedstartups.com/blog/th e-importance-of-object-detection-in- advanced-driver-assistance-systems-adas AEB. PakWheels Blog. (n.d.). https://www.pakwheels.com/blog/understan ding-cars-braking-system/aeb/ Applied Sciences. Applied Sciences | 2022 - Browse Issues. (n.d.). https://www.mdpi.com/2076-3417/12 Adtrak.admin. (2022a, November 28). Autonomous emergency braking: Adas guide. The Windscreen Company. https://www.thewindscreenco.co.uk/adas- guide/autonomous-emergency-braking-aeb/ Media, N. (2020, December 17). NHTSA announces 2020 update on AEB installation by 20 automakers. https://www.nhtsa.gov/press-releases/nhtsa- announces-2020-update-aeb-installation-20- automakers Keep your distance. Solution | Keep your distance | Calculus meets Functions | Underground Mathematics. (n.d.). https://undergroundmathematics.org/calculu s-meets-functions/keep-your- distance/solution Frendi. (n.d.). What is brake distance and stopping distance? https://frendioriginal.com/blog/what-is- brake-distance-and-stopping-distance Braking distance - australian mathematical sciences institute. (n.d.-a). https://www.amsi.org.au/teacher_modules /pdfs/Maths_delivers/Braking5.pdf Brake system pressure - Mark Williams Enterprises, Inc. (n.d.). https://www.markwilliams.com/brake- system-pressure.html Brake system pressure - Mark Williams Enterprises, Inc. (n.d.). https://www.markwilliams.com/brake- system-pressure.html Definitions, Acronyms, and Abbreviations Speed-Distance Braking in Autonomous Vehicles (SDBAV): A safety system in vehicles that utilizes sensors and automated control mechanisms to detect and mitigate potential collisions by autonomously applying the brakes. 7. Autonomous Emergency Braking (AEB): A safety technology in vehicles that automatically applies the brakes to prevent or mitigate collisions with obstacles, vehicles, or pedestrians, without driver intervention. 8. 9. Time to Collision (TTC): Time to back-over collision with an object. Human Machine Interface (HMI): what the driver sees, hears, and feels in the vehicle. 10. Electronic Park Brake (EPB): holds the vehicle stationary while the vehicle is either ON or OFF. Electronic Braking Control Module (EBCM): The Vehicle Braking System. 11. National Highway Traffic Safety Administration (NHTSA): A U.S. government agency responsible for setting and enforcing safety performance standards for motor vehicles and investigating safety defects. 12. Design Failure Mode and Effects Analysis (DFMEA): It's a structured approach used in product development and engineering to identify potential failure modes in a design, assess their potential effects on the product's performance, and prioritize actions to mitigate or eliminate these risks. 13. 14. Long Range Radar (LRR): Long-Range Radar systems are designed to detect and track targets at extended distances, often several hundred kilometers away. 15. ?????????: Relative Distance is the distance between the vehicle and the other vehicle. ??????????? ??????: Relative Speed is the relative speed between the vehicle and the other vehicle.