Download
1 / 18
180 likes | 651 Views
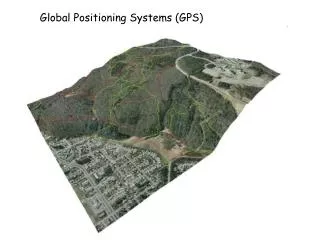
Global Positioning Systems (GPS) for Precision Farming. An Introduction. The plan. Introduction to GPS What is GPS How GPS works Differential Correction Integration and application of GPS into PF systems. Introduction to GPS. What is GPS

E N D
Global Positioning Systems(GPS)for Precision Farming An Introduction
The plan • Introduction to GPS • What is GPS • How GPS works • Differential Correction • Integration and application of GPS into PF systems
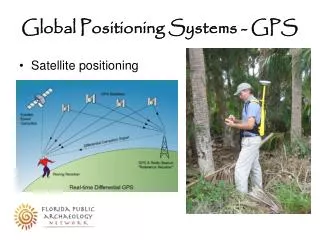
Introduction to GPS • What is GPS • The Global Positioning System (GPS) is a worldwide radio-navigation system formed from a constellation of 24 satellites and their ground stations • GPS receivers use these satellites as reference points to calculate positions and time • Originally known as NAVigation System with Timing And Ranging (NAVSTAR)
How GPS Works (Six Steps) 1. Triangulation 2. Distance 3. Clocks 4. Satellite Position 5. Coordinate system 6. Errors
Triangulation • Number of Satellites • One distance = sphere • Two distances = circle • Three distances = two points • Four distances = one point • Three distances + earths surface = one point • Locking • 1,2 satellites - No lock, course time • 3 Satellites - 2D positioning (Earth’s surface assumed) • 4 Satellites - 3D positioning (Lat/Lon/Alt)
Triangulation - critical points • Position is calculated from distance measurements (ranges) to satellites. • Mathematically we need four satellite ranges to determine exact position. • Three ranges are enough if we reject ridiculous answers or use other tricks. • Another range is required for calculation of time.
Distance • Distance = Speed x Time ? • 180 miles = 60 miles per hour x 3 hours • Speed of radio waves ? • 186 kmps • Time • 0.06 second • Distance = 186000 mps x 0.06 s • D = 11,160 miles (11Hr 58 Min period) • Accuracy (+/- 0.000,000,001 sec) = +/- 1 ns
Distance • How does a receiver time the signal travel? • Satellites send a pseudo-random code • (each sends its own song of 1’s and 0’s) • Receiver matches its calculated sequence with the received signal by delaying more or less it’s signal • The amount of delay = the transit time! • How does the receiver separate the signals of each of the satellites? • Each satellite has it’s own sequence (song) calculated through a formula • Formula is conveyed in data from the satellites
Distance - critical points • Distance to satellites is determined by measuring signal travel time. • Assume satellite and GPS receiver generate same pseudo-random codes at the same time. • By synchronizing the pseudo-random codes, the delay in receiving the code can be found. • Multiply delay time by the speed of light to get distance
Synchronization • Satellites timing is extremely accurate. • precise atomic clocks on board. • All satellite clocks are synchronized and they send their codes at a known time • Ground GPS unit synchronizes its clock with the satellites • Four satellites with same time = only one correct solution for 1. time and 3. distances • (4 Equations, 4 unknowns)
Synchronization - critical points • Accurate timing allows distance to satellites to be measured • Satellites achieve accurate timing with on-board atomic clocks. • Receiver clocks can be accurate because an extra satellite range measurement can remove errors.
Where are the satellites? (ephemeris) • Satellites are launched into precise orbits • GPS receivers use an almanac to calculate accurate positions for the satellites (ephemeris) • Almanac is sent from satellites • US Airforce measures error in ephemeris (satellite position and speed) when they fly over C. Springs • Corrected ephemeris info is sent up to the satellite
ephemeris - critical points • Satellite position (ephemeris) must be known as a reference for range measurements. • GPS satellite orbits are very predictable. • Minor variations in their orbits are measured by the Department of Defense. • The ephemeris error information is sent to the satellites, to be transmitted along with the timing signals.
Coordinate Systems • ECEF Coordinates • Latitude/Longitude/Altitude • Degrees Minutes Seconds (Ag Hall, OSU USA) • Latitude 360 07’ 29” N • Longitude 970 04’ 21” W • Latitude = degrees from equator N or S • Longitude = degrees from Greenwitch E or W • Altitude = Meters above reference geoid • GPS uses WGS84 Ellipsoid (ECEF) • Can be transformed to others: NAD27, NAD83 • See: Peter Dana’s Web site
Coordinate Systems • UTM • Cartesian positioning in meters • Abbreviation for “Universal Transverse Mercator” • Divided into cartesian zones • 60 wide, 840 North to 800 south • Reference • Specifies a starting point for measurement • eg.: (NAD 1927) • Important to account for error between survey reference and actual lat/lon
Error Budget Trimble Navigation Limited