Download
1 / 1
10 likes | 137 Views
Biomimetic Walking Robot Team Members: Brian Connell, Scott Kramer, Chris Popiela, Kelly Swinson w/ Raymond King(ESM, Jr) Advisor : Dr. Shane Ross

E N D
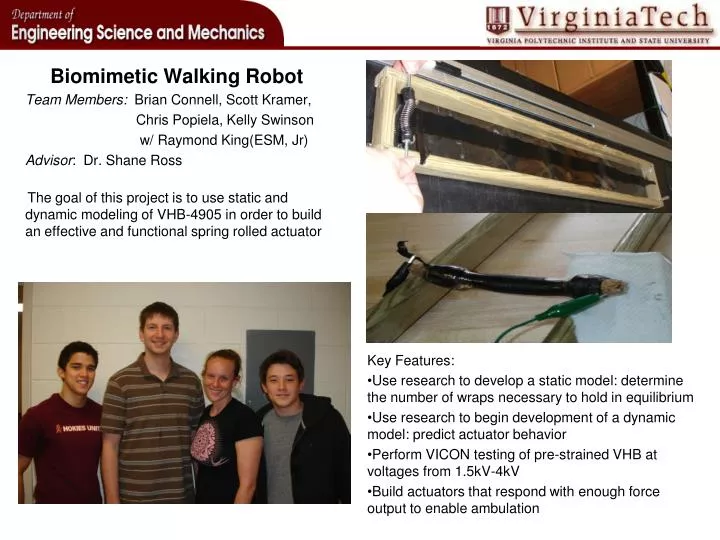
Biomimetic Walking Robot Team Members: Brian Connell, Scott Kramer, Chris Popiela, Kelly Swinson w/ Raymond King(ESM, Jr) Advisor: Dr. Shane Ross The goal of this project is to use static and dynamic modeling of VHB-4905 in order to build an effective and functional spring rolled actuator Key Features: • Use research to develop a static model: determine the number of wraps necessary to hold in equilibrium • Use research to begin development of a dynamic model: predict actuator behavior • Perform VICON testing of pre-strained VHB at voltages from 1.5kV-4kV • Build actuators that respond with enough force output to enable ambulation