Download

1 / 103
1.05k likes | 1.32k Views
Dynamics AE-001. Sharif University-Aerospace Dep. Fall 2004. Rectangular Components. Chapter 2 STATICS OF PARTICLES. Forces are vector quantities ; they add according to the parallelogram law. The magnitude and direction of the

E N D
Dynamics AE-001 Sharif University-Aerospace Dep. Fall 2004
Chapter 2 STATICS OF PARTICLES Forces are vectorquantities; they add according to the parallelogram law. The magnitude and direction of the resultant R of two forces P and Q can be determined either graphically or by trigonometry. R P A Q
Any given force acting on a particle can be resolved into two or more components, i.e.., it can be replaced by two or more forces which have the same effect on the particle. A force F can be resolved into two components P and Q by drawing a parallelogram which has F for its diagonal; the components P and Q are then represented by the two adjacent sides of the parallelogram and can be determined either graphically or by trigonometry. Q F A P
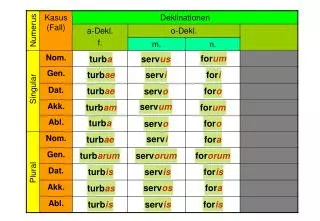
Fy tan q = Fx F = Fx + Fy 2 2 A force F is said to have been resolved into two rectangular componentsif its components are directed along the coordinate axes. Introducing the unit vectors i and j along the x and y axes, F = Fxi + Fyj y Fx = F cos qFy = F sin q Fy = Fyj F j q x i Fx = Fx i
Ry tan q = R = Rx + Ry 2 2 Rx Whenthree or more coplanar forces act on a particle, the rectangular components of their resultant R can be obtained by adding algebraically the corresponding components of the given forces. Rx= SRx Ry= SRy The magnitude and direction of R can be determined from
y y B B qy Fy Fy A F A F D D O O Fx x qx Fx x Fz Fz E E C C z z y A force Finthree-dimensional spacecan be resolved into components B Fy F Fx = Fcos qxFy = Fcos qy A D O Fz = Fcos qz Fx x qz E Fz C z
y l(Magnitude = 1) The cosines of qx, qy, and qz are known as the direction cosines of the force F. Using the unit vectorsi, j, and k, we write Fyj F = Fl cos qyj Fxi cos qzk x Fzk F = Fxi + Fyj +Fz k cos qxi z or F = F (cosqxi + cosqyj + cosqzk )
y F = Fx + Fy+ Fz 2 2 2 Fz F Fy F Fx F cosqz= cosqy = cosqx = l(Magnitude = 1) cos qyj l = cosqxi + cosqyj + cosqzk Fyj cos qzk F = Fl Since the magnitude of l is unity, we have Fxi cos2qx + cos2qy + cos2qz= 1 x Fzk z cos qxi In addition,
1 d MN MN l = = ( dxi + dyj + dzk ) y A force vector F in three-dimensions is defined by its magnitude F and two points Mand N along its line of action. The vector MN joining points M and N is N (x2, y2, z2) F dy = y2 - y1 l dz = z2 - z1 < 0 dx = x2 - x1 M (x1, y1, z1) x z MN = dxi + dyj + dzk The unit vector l along the line of action of the force is
F d F = Fl = ( dxi + dyj + dzk ) y 2 2 2 d= dx + dy + dz N (x2, y2, z2) dy = y2 - y1 A force F is defined as the product of F and l. Therefore, dz = z2 - z1 < 0 dx = x2 - x1 M (x1, y1, z1) x z From this it follows that Fdx d Fdz d Fdy d Fx= Fz= Fy=
When two or more forces act on a particle inthree-dimensions, the rectangular components of their resultant R is obtained by adding the corresponding components of the given forces. Rx= SFx Ry= SFy Rz= SFz The particle is in equilibrium when the resultant of all forces acting on it is zero.
V = P xQ The vector product of two vectors is defined as Q V = P xQ q P The vector product of P and Q forms a vector which is perpendicular to both P and Q, of magnitude V = PQ sin q This vector is directed in such a way that a person located at the tip of V observes as counterclockwise the rotation through q which brings vector P in line with vector Q. The three vectors P, Q, and V - taken in that order - form a right-hand triad. It follows that Qx P = - (PxQ)
j It follows from the definition of the vector product of two vectors that the vector products of unit vectors i,j, andkare k i i xi = jxj = kxk = 0 i xj = k,jxk = i , kxi = j , i xk = - j , jxi = - k , k xj = - i The rectangular components of the vector product V of two vectors P and Q are determined as follows: Given P = Pxi + Pyj + Pzk Q = Qxi + Qyj + Qzk The determinant containing each component of P and Q is expanded to define the vector V, as well as its scalar components
P = Pxi + Pyj + Pzk Q = Qxi + Qyj + Qzk i Px Qx j Py Qy k Pz Qz V = PxQ = = Vxi + Vyj + Vzk where Vx= PyQz- PzQy Vy = PzQx- PxQz Vz = PxQy- PyQx
Mo The moment of force F about point O is defined as the vector product MO = rxF F where r is the position vector drawn from point O to the point of application of the force F. The angle between the lines of action of r and F is q. r O q d A The magnitude of the moment of F about O can be expressed as MO = rF sin q = Fd where d is the perpendicular distance from O to the line of action of F.
y A (x , y, z ) Fyj yj The rectangular components of the moment Mo of a force F are determined by expanding the determinant of r x F. Fxi r Fzk xi O x zk z j y Fy k z Fz i x Fx Mo = rxF = = Mxi + Myj + Mzk Mx = yFz- zFyMy = zFx- xFz Mz = xFy- yFx where
y A (x A, yA, z A) Fyj B (x B, yB, z B) In the more general case of the moment about an arbitrary point B of a force F applied at A, we have Fxi r Fzk O x z i xA/B Fx k zA/B Fz j yA/B Fy MB = rA/BxF = rA/B= xA/Bi + yA/Bj + zA/Bk where xA/B= xA- xB yA/B= yA- yB zA/B= zA- zB and
F In the case of problems involving only two dimensions, the force F can be assumed to lie in the xy plane. Its moment about point Bis perpendicular to that plane. It can be completely defined by the scalar y Fyj A Fxi rA/B (yA - yB ) j B (xA - xB ) i O x z MB = MBk MB = (xA- xB )Fy + (yA- yB ) Fx The right-hand rule is useful for defining the direction of the moment as either into or out of the plane (positive or negative kdirection).
P Q = PQ cos q P Q = PxQx+ PyQy+ PzQz The scalar product of two vectors PandQis denoted as PQ ,and is defined as Q q where q is the angle between the two vectors P The scalar product of P and Q is expressed in terms of the rectangular components of the two vectors as
y L The projection of a vector P on an axis OL can be obtained by forming the scalar product of P and the unit vector l along OL. qy A l P qx x O qz z POL= P l Using rectangular components, POL= Pxcos qx + Pycos qy + Pzcos qz
The mixed triple product of three vectors S, P, and Q is Sx Px Qx Sy Py Qy Sz Pz Qz S(PxQ ) = The elements of the determinant are the rectangular components of the three vectors.
y The moment of a force F about an axis OLis the projection OC onOLof the moment MO of the forceF. This can be written as a mixed triple product. L MO F C l A (x, y, z) r O x z l x x Fx l y y Fy l z z Fz MOL = l MO =l(r xF) = lx, ly , lz = direction cosines of axis OL x, y , z= components of r Fx, Fy , Fz= components of F
Kinematics of Particles Chapter 11
P O x x The velocity v of the particle is equal to the time derivative of the position coordinate x, dx dt v = and the accelerationa is obtained by differentiating v with respect to t, dv dt d 2x dt 2 a = a = or we can also express a as dv dx a = v
Two types of motion are frequently encountered: uniform rectilinear motion, in which the velocity v of the particle is constant and x = xo + vt and uniformly accelerated rectilinear motion, in which the acceleration a of the particle is constant and v = vo + at 1 2 x = xo + vot + at2 v2 = vo + 2a(x - xo ) 2
O A B x xB/A xA xB When particles A and B move along the same straight line, the relative motion of B with respect to A can be considered. Denoting by xB/Athe relative position coordinate of B with respect to A , we have xB = xA + xB/A Differentiating twice with respect to t, we obtain aB = aA + aB/A vB = vA + vB/A where vB/A and aB/A represent, respectively, the relative velocity and the relative acceleration of B with respect to A.
xC xA xB C A B When several blocks are are connected by inextensible cords, it is possible to write a linear relation between their position coordinates. Similar relations can then be written between their velocities and their accelerations and can be used to analyze their motion.
y It is sometimes convenient to resolve the velocity and acceleration of a particle P into components other than the rectangular x, y, and z components. For a particle P moving along a path confined to a plane, we attach to P the unit vectors et tangent to the path and en normal to the path and directed toward the center of curvature of the path. C v 2 r an = en dv dt at = et P x O The velocity and acceleration are expressed in terms of tangential and normal components. The velocity of the particle is v = vet The acceleration is v2 r dv dt a = et + en
y C v = vet v 2 r an = en v2 r dv dt a = et + en dv dt at = et P x O In these equations, v is the speed of the particle and r is the radius of curvature of its path. The velocity vector v is directed along the tangent to the path. The acceleration vector a consists of a component at directed along the tangent to the path and a component an directed toward the center of curvature of the path,
eq When the position of a particle moving in a plane is defined by its polar coordinates r and q, it is convenient to use radial and transverse components directed, respectively, along the position vector r of the particle and in the direction obtained by rotating r through 90o counterclockwise. Unit er r = rer P q x O vectors er and eq are attached to P and are directed in the radial and transverse directions. The velocity and acceleration of the particle in terms of radial and transverse components is . . v = rer + rqeq .. . . .. . a = (r - rq2)er + (rq + 2rq)eq
eq . . er v = rer + rqeq . . .. .. . r = rer P a = (r - rq2)er + (rq + 2rq)eq q x O In these equations the dots represent differentiation with respect to time. The scalar components of of the velocity and acceleration in the radial and transverse directions are therefore . . vr = rvq= rq .. . . . .. ar = r - rq2 aq = rq + 2rq It is important to note that ar is not equal to the time derivative of vr, and that aq is not equal to the time derivative of vq.
Newton’s Second Law Chapter 12
ay y To solve a problem involving the motion of a particle, S F = mashould be replaced by equations containing scalar quantities. Using rectangular components of F and a, we have P ax az S Fx = max S Fy = may S Fz = maz x z Using tangential and normal components, y an dv dt S Ft = mat = m at v2 r P S Fn = man= m x O Using radial and transverse components, aq . .. ar S Fr = mar= m(r - rq2) P r . .. . q S Fq = maq= m(rq + 2rq) x O
mv When the only force acting on a particle P is a force F directed toward or away from a fixed point O, the particle is said to be moving under a central force. Since S MO = 0 at any given instant, it follows that HO = 0 for all values of t, and f P mv0 r O f0 r0 . P0 HO = constant We conclude that the angular momentum of a particle moving under a central force is constant, both in magnitude and direction, and that the particle moves in a plane perpendicular to HO.
mv Recalling that HO = rmv sin f, we have, for points PO and P f P mv0 r rmv sin f = romvo sin fo O f0 r0 P0 for the motion of any particle under a central force. . . Using polar coordinates and recalling that vq = rqandHO = mr2q, we have . r2q = h where h is a constant representing the angular momentum per unit mass Ho/m, of the particle.
Work Energy Chapter 13
Chapter 13 KINETICS OF PARTICLES: ENERGY AND MOMENTUM METHODS Consider a force F acting on a particle A. The work of Fcorresponding to the small displacement dr is defined as A2 ds s2 a A dr F A1 dU = Fdr s s1 Recalling the definition of scalar product of two vectors, dU = Fds cosa where a is the angle between F and dr.
dU = Fdr = Fds cosa A2 ds s2 a The work of F during a finite displacement from A1 to A2 , denoted by U1 2 , is obtained A dr F A1 s s1 by integrating along the path described by the particle. A2 ò U1 2 = Fdr A1 For a force defined by its rectangular components, we write A2 ò U1 2 = (Fxdx + Fydy + Fzdz) A1
A2 The work of the weight W of a body as its center of gravity moves from an elevation y1to y2 is obtained by setting Fx = Fz = 0 and Fy = - W. W dy y2 A A1 y y1 y2 ò U1 2 = - Wdy = Wy1 - Wy2 y1 The work is negative when the elevation increases, and positive when the elevation decreases.
A O x 2 U = - k x dx A x 1 1 2 1 x 1 1 1 = kx - kx 1 2 2 2 A x 2 2 The work of the force F exerted by a spring on a body A during a finite displacement of the body from A1 (x = x1) to A2 (x = x2) is obtained by writing spring undeformed B dU = -Fdx = -kx dx ò B F 2 2 A x The work is positive when the spring is returning to its undeformed position. . B
The kinetic energy of a particle of mass m moving with a velocity v is defined as the scalar quantity 1 2 T = mv2 From Newton’s second law the principle of work and energy is derived. This principle states that the kinetic energy of a particle atA2can be obtained by adding to its kinetic energy at A1 the work done during the displacement from A1 to A2 by the force F exerted on the particle: T1 + U1 2 = T2
The power developed by a machine is defined as the time rate at which work is done: dU dt Power = = F v where F is the force exerted on the particle and v is the velocity of the particle. The mechanical efficiency, denoted by h, is expressed as power output power input h =
When the work of a force F is independent of the path followed, the force F is said to be a conservative force, and its work is equal to minus the change in the potential energy V associated with F : U1 2 = V1 - V2 The potential energy associated with each force considered earlier is Vg = Wy Force of gravity (weight): GMm r Vg = - Gravitational force: 1 2 Ve = kx2 Elastic force exerted by a spring:
U1 2 = V1 - V2 This relationship between work and potential energy, when combined with the relationship between work and kinetic energy (T1 + U1 2 = T2) results in T1 + V1 = T2 + V1 This is the principle of conservation of energy, which states that when a particle moves under the action of conservative forces, the sum of its kinetic and potential energies remains constant. The application of this principle facilitates the solution of problems involving only conservative forces.
Impulse & Momentum Chapter 13
The linear momentum of a particle is defined as the product mv of the mass m of the particle and its velocity v. From Newton’s second law, F = ma, we derive the relation t2 ò mv1 + Fdt = mv2 t1 where mv1 and mv2 represent the momentum of the particle at a time t1 and a time t2 , respectively, and where the integral defines the linear impulse of the force F during the corresponding time interval. Therefore, mv1 + Imp1 2 = mv2 which expresses the principle of impulse and momentum for a particle.
When the particle considered is subjected to several forces, the sum of the impulses of these forces should be used; mv1 + SImp1 2 = mv2 Since vector quantities are involved, it is necessary to consider their x and y components separately. The method of impulse and momentum is effective in the study of impulsive motion of a particle, when very large forces, called impulsive forces, are applied for a very short interval of timeDt, since this method involves impulses FDt of the forces, rather than the forces themselves. Neglecting the impulse of any nonimpulsive force, we write mv1 + SFDt= mv2
In the case of the impulsive motion of several particles, we write Smv1 + SFDt= Smv2 where the second term involves only impulsive, external forces. In the particular case when the sum of the impulses of the external forces is zero, the equation above reduces to Smv1 = Smv2 that is, the total momentum of the particles is conserved.