Download

1 / 24
240 likes | 427 Views
Desenvolvimento de uma plataforma humanóide autónoma de custo limitado: Componentes e Soluções Tecnológicas. Autores: A. Cardoso L. Gomes N. Pereira M. Silva V. Santos F. Silva. Departamento de Engenharia Mecânica - Universidade de Aveiro. Sumário:. Motivações:

E N D
Desenvolvimento de uma plataforma humanóide autónoma de custo limitado: Componentes e Soluções Tecnológicas Autores: A. Cardoso L. Gomes N. Pereira M. Silva V. Santos F. Silva Departamento de Engenharia Mecânica - Universidade de Aveiro
Sumário: • Motivações: • Motivações de grandes empresas; • Motivações do DEM da UA; • Parte estrutural: • Requisitos na concepção; • Plataforma modelada; • Análise estática; • Actuação e percepção: • Sensores e percepção; • Hierarquia do controlo distribuído; • Controlo velocidade;
Motivos para a construção de um humanóide por grandes empresas: • Sonho de imitar o ser humano; • Plataforma robótica de enorme versatilidade, que se pode adaptar a diversas tarefas; • Indústria de entretenimento; • Robótica de serviços (questões psicológicas);
Humanóides mais conhecidos:QRIO (Sony) e ASIMO (Honda) http://www.plyojump.com
Outros humanóides menos conhecidos:HRP 1S (Kawada) e Nuvo (ZMP) Nuvo está em comercialização desde Março de 2004 por $4.600 HRP tem prevista a sua comercialização em 2008 por$360.000 http://www.kawada.co.jp/ams/hrp-2/index_e.html http://www.plyojump.com/zmp.html
Motivos para a construção de um humanóide no DEM da UA: • Aplicar e desenvolver conhecimentos técnicos e de engenharia num projecto de elevada exigência; • Desenvolver uma plataforma para participar no RoboCup, na classe KidSize de humanóides; • Construir uma plataforma para futuro trabalho de investigação;
Requisitos gerais na concepção: • Graus de liberdade (DOF) suficientes para locomoção versátil (jogar futebol na RoboCup!); • Actuadores e baterias existentes no mercado (custo, dimensões, peso, binário, corrente, etc.); • Possibilidade de afinação das transmissões; • Estrutura e proporções para participar no RoboCup; • Materiais leves mas resistentes;
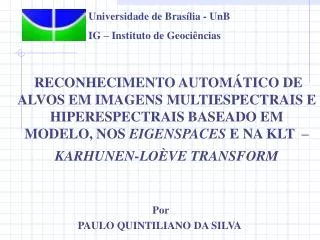
Juntas e graus de liberdade: • Junta universal nos pés (2 DOF), para fácil locomoção; • Junta esférica na anca (3 DOF) para permitir mudança de direcção; • Junta universal na cintura para “ajudar” o arranque e equilíbrio lateral do robot; • Junta universal nos ombros, para “ajudar” a locomoção e futuras aplicações; • Junta universal no pescoço para poder “olhar” em volta e para o chão; Estrutura superior Anca Joelho Pé
A plataforma em números: Amplitude de movimentos: Peso de cada elo: 60cm Pés: 20 x 8 [cm] 25cm
Análise estática:binários e centros de massa Posição central Inclina ao lado Levanta pé livre Leva pé livre à frente do de apoio Apoia pé livre no chão Inclina ao lado oposto Levanta pé livre Leva pé livre ao lado do de apoio Inclina ao centro (posição central) Próximo passo Parar
Actuadores e baterias Necessidade de razões de transmissão superior a 2, para garantir coeficiente de segurança!!
Escolha dos sensores e unidades de percepção • Potenciómetros (posição das juntas); • Futura unidade de visão (percepção do ambiente); • Determinação da corrente consumida por cada um dos motores; • Sensores de força (estado de equilíbrio); • Inclinómetros (inclinação das diferentes partes…); • Giroscópios (determinação de velocidades angulares);
Distribuição dos sensores Unidade de visão (Cabeça) Giroscópio MURATA -ENC-03J Potenciómetro (Motores) Motor (HITEC 815BB+) Inclinómetro ANALOG DEVICE - ADXL202JE Determinação da corrente consumida Resistência de potência Pé sensível à força
Desenvolvimento de um protótipode pé sensível à força Material – Acrílico Extensómetro Medição da deformação Ponte Wheatstone + Amplificador de instrumentação Pé com 4 Sensores Protótipo construído para testes
Pé sensível à força : Calibração • Relação praticamente linear entre o peso (força) e o valor medido; • Coeficientes de correlação para as curvas dos 4 extensómetros variam entre 0.983 e 0.998;
Exemplo do funcionamento do pé Resposta do motor às forças no pé
CONTROLO PRINCIPAL RS232 MESTRE ESCRAVOS CAN BUS 3 3 1 2 2 2 2 1 1 1 3 3 2 2 1 1 3 3 2 2 1 1 Hierarquia do controlo distribuído • Unidade de controlo principal: • Decisões de alto nível e algoritmos de visão artificial; • Controlador mestre; • Distribui ordens e recolhe dados dos escravos; • Controladores escravos; • Controlo de 3 motores no máximo por módulo; • Aquisição dos valores sensoriais;
Vantagens do controlo distribuído • Distribuição das tarefas pelos vários módulos; • Funcionamento em paralelo – mais eficiente; • Possibilidade de algoritmos locais de controlo; • Funcionamento independente dos vários módulos; • Melhor diagnóstico; • Maior tolerância a falhas locais;
Módulos de controlo escravo Unidade para aquisição de sinais analógicos (16 Máx.) Resistências de potência Endereçamento do módulo escravo 3 Portas para controlo dos servomotores Porta de comunicação série RS232 Unidade de comunicação CAN
Valor da velocidade [0-5] 3º Byte Controlo Principal 2º Byte Valor da posição [0º-180º] 1º Byte Identificação da mensagem RS232 MESTRE 7 6 5 4 3 2 1 0 Número da junta Número do módulo de controlo Tipo de mensagem Comunicações entre a unidade principal de controlo e o mestre • Mensagens possíveis: • Leitura dos valores sensoriais de um escravo a indicar; • Leitura da posição de qualquer articulação do sistema; • Leitura dos valores dos proveniente dos sensores; • Alterar a posição e a velocidade de qualquer junta do sistema;
Variação de velocidade em servomotores de posição • Solução implementada: • Controlo de velocidade por software em malha fechada; Objectivo: Adaptar o controlo para implementar velocidades variáveis em servomotores de posição.
Ponto de situação • Estrutura – transmissão por polia/correia dentada em todas as juntas onde a actuação não é directa; • Padrões de locomoção a um nível ainda básico; • Unidade de controlo; • Mestre e escravo: em fabrico (SMD); • Sensores: placa de piggy-back em desenvolvimento; • Pé em desenvolvimento; • Controlo central e visão ainda a definir;
Conclusões e perspectivas futuras • Solução mecânica; • Arquitectura distribuída; • Sensor força; • Giroscópio e acelerómetro; • OBJECTIVO: Participar no RoboCup 2006 na classe para humanóides.
Desenvolvimento de uma plataforma humanóide autónoma de custo limitado: Componentes e Soluções Tecnológicas Autores: A. Cardoso L. Gomes N. Pereira M. Silva V. Santos F. Silva Departamento de Engenharia Mecânica - Universidade de Aveiro