Download
1 / 38
380 likes | 493 Views
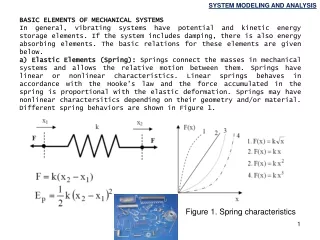
Tools for Reduction of Mechanical Systems. Ravi Balasubramanian, Klaus Schmidt, and Elie Shammas Carnegie Mellon University. Motivation: Two Mass System. Two masses on the real line:. Lagrangian:. Equations of Motion:. Set A: Two 2 nd order differential equations.

E N D
Tools for Reductionof Mechanical Systems Ravi Balasubramanian, Klaus Schmidt, and Elie Shammas Carnegie Mellon University
Motivation: Two Mass System Two masses on the real line: Lagrangian: Equations of Motion: Set A: Two 2nd order differential equations Set B: One 1st order and one 2nd order differential equations • Two sets of equations, but same solution. • When can we do such a simplification (reduction)? • What tools to use? Center for the Foundations of Robotics
Overview • Fiber Bundle • Projection map • Lifted projection map • Decomposition of Velocity Spaces • Vertical and Horizontal Spaces • Principal Connections • Example on • Mechanical Connections • Momentum map • Locked Inertia Tensor • Local Form Center for the Foundations of Robotics
Fiber Bundle • A manifold with a base space and a map is a fiber bundle if: • A fiber Y is the pre-image of b under • Property of : for every point b2B9 U 3 b such that: is homeomorphic to Or locally for • If locally Y is a group, Q is a principal fiber bundle. • If Y is a group everywhere, Q is a trivial principal fiber bundle. Center for the Foundations of Robotics
Lifted Bundle Projection Map • Two-mass System • Choose as fiber, as base space. Center for the Foundations of Robotics
Velocity Decomposition • Vertical Space • Horizontal Space • Two mass example • Why do velocity decomposition? • Understand how fiber velocities and base space velocities interact. Center for the Foundations of Robotics
Overview • Fiber Bundle • Projection map • Lifted projection map • Vertical and Horizontal Spaces • Principal Connections • Example on • Mechanical Connections • Momentum map • Locked Inertia Tensor • Local Form Center for the Foundations of Robotics
Principal Connections Definition: A principal connection on the principal bundle is a map that is linear on each tangent space such that 1) 2) Center for the Foundations of Robotics
Connection Property 1 Center for the Foundations of Robotics
Connection Property 2 Center for the Foundations of Robotics
Principal Connection on • Choose as the fiber, as base space. • Projection and Lifted Projection Center for the Foundations of Robotics
Left Action on Fiber • Action (Translation) • Trivial to show group properties for . • Thus, the fiber is a group. • Q is a trivial principal fiber bundle. Center for the Foundations of Robotics
Group Actions on Q • Group Action of G on Q: Translation along fiber • Lifted Action of G on Q Center for the Foundations of Robotics
A connection on • Choose a connection of the form • Need to verify if satisfies the connection properties. Center for the Foundations of Robotics
satisfies Property 1. Connection: Property 1 • Exponential map on : • Generator on Q Center for the Foundations of Robotics
satisfies Property 2. Thus, is a connection. Connection: Property 2 • In , is the Identity map. (1) • In , is the Identity map. • Why? No rotations, and Body velocity = Spatial Velocity. • LHS(1) = RHS(1) = Center for the Foundations of Robotics
Definition: Horizontal Space Lemma: satisfies Thus, and decompose into components. Velocity Decomposition Vertical and Horizontal Spaces in Center for the Foundations of Robotics
Velocity Decomposition: Illustration Center for the Foundations of Robotics
If , then: Motion only along fiber Motion in base space and induced motion tangent to fiber. Velocity Decomposition: Interpretation If , then: Motion only along fiber. Motion only in base space. For this example, the connection is arbitrary; Mechanical systems use a specific connection. Center for the Foundations of Robotics
Outline: • Momentum Map • Locked Inertia Tensor • Mechanical Connection • Reconstruction Equation Mechanical Systems Connections for mechanical systems: • define connection based on conservation of momentum Center for the Foundations of Robotics
Physical Intuition: is • momentum of the system • representation in spatial coordinates Momentum Map Definition: with , and : natural pairing between covectors and vectors : for mass matrix and : Center for the Foundations of Robotics
Two-mass example Two masses on the real line: Lagrangian: Mass Matrix: Generator for Lifted map Center for the Foundations of Robotics
Note: is indeed the momentum of the system in spatial coordinates Example: momentum map Center for the Foundations of Robotics
Physical Intuition: is • momentum of the system measured in the instantaneous body frame • representation in body coordinates Body Momentum Map Definition: with , and Center for the Foundations of Robotics
Note: is the momentum of the system measured in the body and represented in body coordinates Example: body momentum map with and Center for the Foundations of Robotics
Physical Intuition: is • inertia of the locked system all base variables are fixed • representation in spatial coordinates Locked Inertia Tensor Definition: with and Center for the Foundations of Robotics
Note: is indeed the locked inertia of the system (for fixed) Example: locked inertia tensor Center for the Foundations of Robotics
Compute Lie-Algebra velocity such that the locked system has the momentum with Intuition: Mechanical Connection Center for the Foundations of Robotics
Mechanical Connection Definition: is the map that assigns to each the spatial Lie-Algebra velocity of the locked system such that the momentum in spatial coordinates is conserved: : locked inertia tensor , : (Body) Momentum Map Definition: Body Connection Center for the Foundations of Robotics
Example: mechanical connection We are ready to compute and Center for the Foundations of Robotics
Vertical velocities: Horizontal velocities: Example: velocities and Recall Center for the Foundations of Robotics
Movement in the base induces movement along the fiber • movement along the fiber without movement in the base Example: velocities Center for the Foundations of Robotics
Note: only depends on and is the group velocity at the origin Local form of the connection Proposition: Let be a principal connection on . Then can be written as and is called the local form of the connection Center for the Foundations of Robotics
Example: local form Center for the Foundations of Robotics
Zero Momentum: General Case: Reconstruction Reconstruction: Center for the Foundations of Robotics
Set B: One 1st order and one 2nd order differential equation Take home message 1) Connection explores system from momentum viewpoint. 2) Decomposition of Velocities using and - Can compute induced motion in fiber from base velocities. Center for the Foundations of Robotics
Conclusions • Principal Connections • Mechanical Connections • Reconstruction Equation • zero-momentum case • Next talk: • symmetries: reduced lagrangian • evaluate general reconstruction equation • introduce constraints (holonomic and nonholonomic) • define reduced equations of motion Center for the Foundations of Robotics
Horizontal Space Definition: Horizontal Space Lemma: satisfies Proof: Choose some Let Note that Thus, Define Note that Define Thus, In general, Center for the Foundations of Robotics