Download

1 / 54
550 likes | 745 Views
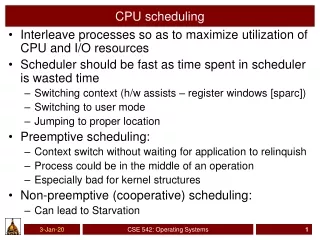
CPU Scheduling. CS 519: Operating System Theory Computer Science, Rutgers University Instructor: Thu D. Nguyen TA: Xiaoyan Li Spring 2002. What and Why?. What is processor scheduling? Why? At first to share an expensive resource – multiprogramming

E N D
CPU Scheduling CS 519: Operating System Theory Computer Science, Rutgers University Instructor: Thu D. Nguyen TA: Xiaoyan Li Spring 2002
What and Why? What is processor scheduling? Why? At first to share an expensive resource – multiprogramming Now to perform concurrent tasks because processor is so powerful Future looks like past + now Rent-a-computer approach – large data/processing centers use multiprogramming to maximize resource utilization Systems still powerful enough for each user to run multiple concurrent tasks CS 519: Operating System Theory
Assumptions Pool of jobs contending for the CPU CPU is a scarce resource Jobs are independent and compete for resources (this assumption is not always used) Scheduler mediates between jobs to optimize some performance criteria CS 519: Operating System Theory
Types of Scheduling We’re mostly concerned with short-term scheduling CS 519: Operating System Theory
What Do We Optimize? System-oriented metrics: Processor utilization: percentage of time the processor is busy Throughput: number of processes completed per unit of time User-oriented metrics: Turnaround time: interval of time between submission and termination (including any waiting time). Appropriate for batch jobs Response time: for interactive jobs, time from the submission of a request until the response begins to be received Deadlines: when process completion deadlines are specified, the percentage of deadlines met must be promoted CS 519: Operating System Theory
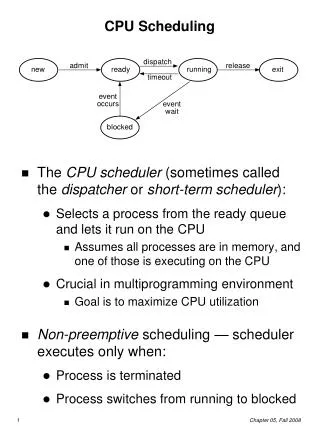
Design Space Two dimensions Selection function Which of the ready jobs should be run next? Preemption Preemptive: currently running job may be interrupted and moved to Ready state Non-preemptive: once a process is in Running state, it continues to execute until it terminates or it blocks for I/O or system service CS 519: Operating System Theory
Job Behavior CS 519: Operating System Theory
Job Behavior CPU I/O-bound jobs Jobs that perform lots of I/O Tend to have short CPU bursts CPU-bound jobs Jobs that perform very little I/O Tend to have very long CPU bursts Distribution tends to be hyper-exponential Very large number of very short CPU bursts A small number of very long CPU bursts Disk CS 519: Operating System Theory
Histogram of CPU-burst Times CS 519: Operating System Theory
Service Time Arrival Time Process 1 0 3 2 2 6 3 4 4 4 6 5 5 8 2 Example Job Set CS 519: Operating System Theory
Behavior of Scheduling Policies CS 519: Operating System Theory
Behavior of Scheduling Policies CS 519: Operating System Theory
Multilevel Queue Ready queue is partitioned into separate queues: foreground (interactive) background (batch) Each queue has its own scheduling algorithm: foreground – RR background – FCFS Scheduling must be done between the queues. Fixed priority scheduling; i.e., serve all from foreground then from background. Possibility of starvation. Time slice – each queue gets a certain amount of CPU time which it can schedule amongst its processes; i.e.,80% to foreground in RR 20% to background in FCFS CS 519: Operating System Theory
Multilevel Queue Scheduling CS 519: Operating System Theory
Multilevel Feedback Queue A process can move between the various queues; aging can be implemented this way. Multilevel-feedback-queue scheduler defined by the following parameters: number of queues scheduling algorithms for each queue method used to determine when to upgrade a process method used to determine when to demote a process method used to determine which queue a process will enter when that process needs service CS 519: Operating System Theory
Multilevel Feedback Queues CS 519: Operating System Theory
Example of Multilevel Feedback Queue Three queues: Q0 – time quantum 8 milliseconds Q1 – time quantum 16 milliseconds Q2 – FCFS Scheduling A new job enters queue Q0which is servedFCFS. When it gains CPU, job receives 8 milliseconds. If it does not finish in 8 milliseconds, job is moved to queue Q1. At Q1 job is again served FCFS and receives 16 additional milliseconds. If it still does not complete, it is preempted and moved to queue Q2. CS 519: Operating System Theory
Traditional UNIX Scheduling Multilevel feedback queues 128 priorities possible (0-127) 1 Round Robin queue per priority Every scheduling event the scheduler picks the lowest priority non-empty queue and runs jobs in round-robin Scheduling events: Clock interrupt Process does a system call Process gives up CPU,e.g. to do I/O CS 519: Operating System Theory
Traditional UNIX Scheduling All processes assigned a baseline priority based on the type and current execution status: swapper 0 waiting for disk 20 waiting for lock 35 user-mode execution 50 At scheduling events, all process’s priorities are adjusted based on the amount of CPU used, the current load, and how long the process has been waiting. Most processes are not running, so lots of computing shortcuts are used when computing new priorities. CS 519: Operating System Theory
UNIX Priority Calculation Every 4 clock ticks a processes priority is updated: The utilization is incremented every clock tick by 1. The niceFactor allows some control of job priority. It can be set from –20 to 20. Jobs using a lot of CPU increase the priority value. Interactive jobs not using much CPU will return to the baseline. CS 519: Operating System Theory
UNIX Priority Calculation Very long running CPU bound jobs will get “stuck” at the highest priority. Decay function used to weight utilization to recent CPU usage. A process’s utilization at timetis decayed every second: The system-wide load is the average number of runnable jobs during last 1 second CS 519: Operating System Theory
UNIX Priority Decay 1 job on CPU. load will thus be 1. Assume niceFactor is 0. Compute utilization at time N: +1 second: +2 seconds +N seconds CS 519: Operating System Theory
Scheduling Algorithms FIFO is simple but leads to poor average response times. Short processes are delayed by long processes that arrive before them RR eliminate this problem, but favors CPU-bound jobs, which have longer CPU bursts than I/O-bound jobs SJN, SRT, and HRRN alleviate the problem with FIFO, but require information on the length of each process. This information is not always available (although it can sometimes be approximated based on past history or user input) Feedback is a way of alleviating the problem with FIFO without information on process length CS 519: Operating System Theory
It’s a Changing World Assumption about bi-modal workload no longer holds Interactive continuous media applications are sometimes processor-bound but require good response times New computing model requires more flexibility How to match priorities of cooperative jobs, such as client/server jobs? How to balance execution between multiple threads of a single process? CS 519: Operating System Theory
Lottery Scheduling Randomized resource allocation mechanism Resource rights are represented by lottery tickets Have rounds of lottery In each round, the winning ticket (and therefore the winner) is chosen at random The chances of you winning directly depends on the number of tickets that you have P[wining] = t/T, t = your number of tickets, T = total number of tickets CS 519: Operating System Theory
Lottery Scheduling After n rounds, your expected number of wins is E[win] = nP[wining] The expected number of lotteries that a client must wait before its first win E[wait] = 1/P[wining] Lottery scheduling implements proportional-share resource management Ticket currencies allow isolation between users, processes, and threads OK, so how do we actually schedule the processor using lottery scheduling? CS 519: Operating System Theory
Implementation CS 519: Operating System Theory
Performance Allocated and observed execution ratios between two tasks running the Dhrystone benchmark. With exception of 10:1 allocation ratio, all observed ratios are close to allocations CS 519: Operating System Theory
Short-term Allocation Ratio CS 519: Operating System Theory
Isolation Five tasks running the Dhrystone benchmark. Let amount.currency denote a ticket allocation of amount denominated in currency. Tasks A1 and A2 have allocations 100.A and 200.A, respectively. Tasks B1 and B2 have allocations 100.B and 200.B, respectively. Halfway thru experiment B3 is started with allocation 300.B. This inflates the number of tickets in B from 300 to 600. There’s no effect on tasks in currency A or on the aggregate iteration ratio of A tasks to B tasks. Tasks B1 and B2 slow to half their original rates, corresponding to the factor of 2 inflation caused by B3. CS 519: Operating System Theory
Borrowed-Virtual-Time (BVT) Scheduling Current scheduling in general purpose systems does not support rapid dispatch of latency-sensitive applications Examples include continuous media applications such as teleconferencing, playing movies, voice-over-IP, etc. What’s the problem with the traditional Unix scheduler? Beauty of BVT is its simplicity Corollary: not that much to say Tricky part is figuring out the appropriate parameters ½ of the paper is on this (which I’m going to skip) CS 519: Operating System Theory
BVT Scheduling: Basic Idea Scheduling is done based on virtual time Each thread has EVT (effective virtual time) AVT (actual virtual time) W (warp factor) warpBack (whether warp is on or not) EVT of thread is computed as Threads accumulate virtual time as they run Thread with earliest EVT is scheduled next CS 519: Operating System Theory
BVT Scheduling: Details Can only switch every C time units to prevent thrashing Threads can accumulate virtual time at different rates Allow for weighted fair sharing of CPU To make sure that latency-sensitive threads are scheduled right away, give these threads high warp values Have limits on how much and how long can warp to prevent abuse CS 519: Operating System Theory
BVT Scheduling: Performance CS 519: Operating System Theory
BVT Scheduling: Performance CS 519: Operating System Theory
BVT Scheduling: Performance CS 519: Operating System Theory
BVT Scheduling: Performance CS 519: Operating System Theory
BVT vs. Lottery How do the two compare? CS 519: Operating System Theory
Simulating Ocean Currents Model as two-dimensional grids Discretize in space and time finer spatial and temporal resolution => greater accuracy Many different computations per time step set up and solve equations Concurrency across and within grid computations (a) Cross sections (b) Spatial discretization of a cross section CS 519: Operating System Theory
Case Study 2: Simulating Galaxy Evolution Simulate interactions of many stars evolving over time Computing forces is expensive O(n2) brute force approach Hierarchical Methods take advantage of force law: G m1m2 r2 CS 519: Operating System Theory
Case Study 2: Barnes-Hut Many time steps, plenty of concurrency across stars within each Locality Goal Particles close together in space should be on same processor Spatial Domain Quad-tree Difficulties: Nonuniform, dynamically changing CS 519: Operating System Theory
3D Scene Projection Plane Dynamically generated ray Ray from viewpoint to upper right corner pixel Viewpoint Case Study 3: Rendering Scenes by Ray Tracing Shoot rays into scene through pixels in projection plane Result is color for pixel Rays shot through pixels in projection plane are called primary rays Reflect and refract when they hit objects Recursive process generates ray tree per primary ray Tradeoffs between execution time and image quality CS 519: Operating System Theory
Partitioning Need dynamic assignment Use contiguous blocks to exploit spatial coherence among neighboring rays, plus tiles for task stealing A tile, the unit of decomposition and stealing A block, the unit of assignment CS 519: Operating System Theory
Sample Speedups CS 519: Operating System Theory
Coscheduling (Gang) Cooperating processes may interact frequently What problem does this lead to? Fine-grained parallel applications have process working set Two things needed Identify process working set Coschedule them Assumption: explicitly identified process working set Some good recent work has shown that it may be possible to dynamically identify process working set CS 519: Operating System Theory
Coscheduling What is coscheduling? Coordinating across nodes to make sure that processes belonging to the same process working set are scheduled simultaneously How might we do this? CS 519: Operating System Theory
Impact of OS Scheduling Policies and Synchronization on Performance Consider performance for a set of applications for Feedback priority scheduling Spinning Blocking Spin-and-block Block-and-hand-off Block-and-affinity Gang scheduling (time-sharing coscheduling) Process control (space-sharing coscheduling) CS 519: Operating System Theory
Applications CS 519: Operating System Theory
“Normal” Scheduling with Spinning CS 519: Operating System Theory