Download
1 / 59
590 likes | 725 Views
First Light AO System for LBT. LBT Meeting, Potsdam, May 16 th , 2002. Personnel and Institutes. S. Esposito, M. Accardo, C. Baffa, V.Biliotti, G. Brusa, M. Carbillet, D. Ferruzzi , L. Fini, I. Foppiani , A. Puglisi, P. Stefanini, R. Ragazzoni , P. Ranfagni, A. Riccardi,

E N D
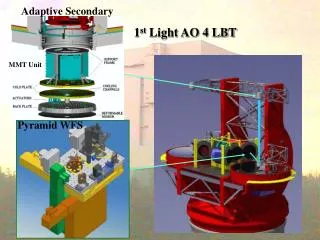
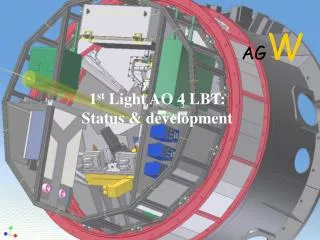
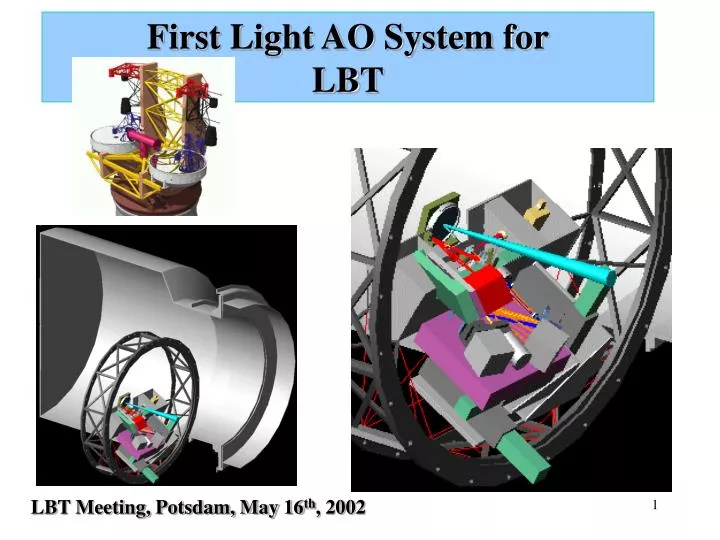
First Light AO System forLBT LBT Meeting, Potsdam, May 16th, 2002
Personnel and Institutes S. Esposito, M. Accardo, C. Baffa, V.Biliotti, G. Brusa, M. Carbillet,D. Ferruzzi , L. Fini,I. Foppiani, A. Puglisi, P. Stefanini, R. Ragazzoni,P. Ranfagni, A. Riccardi, A. Tozzi, C. Verinaud,R. Biasi D. Gallieni, W. Seifert, J.Storm Arcetri Obs. Bologna Obs. Arcetri/Heidelberg MPIA ADS/MicroGate Potsdam/Heidelberg,AIP/MPIA Presented by: S. Esposito
The LBT First-Light AO System The DM, Adaptive Secondary (LBT672) The Natural guide star Wavefront Sensor Opto-Mech. The Laser guide star Wavefront Sensor Opto-Mech. Real-Time loop control HW&SW AO System Integration and Testing System Performance Simulations Time schedule Costs & Manpower
Reduce size, number and • cost of optical elements • High optical throughput • Minimize NCP aberrations • Reduce system flexure • Reduce turbulence WFS • optical path • Easy assembly and testing • the WFS unit • Same HO & TT reference star A Moveable WFS for the AGW unit 20th October 2001 NGS WFS HO&TT 300x400mm,moveable unit acquiring +/- 60 arcsec FOV LGS (Sodium) WFS HO 230x100x100 mm, 110mm refocuseable unit
LUCIFER Dummy entrance window (15o) F15 beam from LBT LGS (Sodium) WFS HO small 120x100x100 mm, 110mm refocuseable unit NGS WFS HO&TT small 300x400mm, moveable unit acquiring +/- 60 arcsec FOV derotator unit LBT AO System: WFSs 17th may 2002 (Potsdam)
Optical set-up Tel. PSF Pyramid Optical set-up I
PSF Image plane Pupil plane The Pyramid Operating Principle The pyramid gain Telescope pupil Glass Pyramid . Pupil re-imager 4 3 DETECTOR 1 2 y pixels used for computation of signal Sx and Sy at the corresponding pupil subarea x
NGS WFS XYZ positioning I NGS Positioning Main Requirements • FOV for reference star acquisition • 2x2 arcmin +/- 36mm • Absolute positioning accuracy • 0.1 arcsec, 60 mm • Stability during AO operation, ~ 1 mm, • TBC with 11 mm PSF FWHM @ 750nm • Telecentric lens of 86mm diameter • Overall unit weight ~ 25 kg, • 7.5 Kg optical bench + 15 Kg board • opto-mech.
Gravity direction Mx [Nm] My [Nm] Mz [Nm] X - 86 17 Y 86 - 45 Z 17 45 - Max allowed 100 230 50 XYZ Bending Moments Linear way #1 Overall mass (lumped on the board) = 25 Kg Position = -10 (toward M3), +40 (toward derotator center), -40(toward LGS) FEA Analysis by ADS
A Moveable NGS WFS forthe AGW Unit I HO CCD detector Strap head Tech./Sci. Viewer PI TT mirror HO pyramid ADC HO beam Filter wheel Filter wheel TT beam F15 beam from Lucifer window Refocusing triplet Telecentric lens mount
A Moveable NGS WFS forthe AGW Unit II F15 beam from Lucifer window Telecentric lens mount Filter wheel HO beam TT beam Refocusing triplet HO pyramid Filter wheel ADC HO CCD detector PI TT mirror Strap head Tech./Sci. Viewer
NGS HO Channel NOT TO SCALE
NGS HO Channel 2) LUCIFER Window 3) Telecentric lens 85mm 4) F45 refocusing triplet 5) ADC compensator 6) BS for HO-TT beams separation 7) Fast steering mirror (PI) 9) Refractive double pyramid 10) Camera lens 11) Pupil image plane * Optical Pupil re-rotator Pyramid Edge losses 10 % TOTAL TRASMISSION 0.83 * 0.9 = 75 %
Pyramid and Pupils arrangements • Pupil diameter 720mm (30pixels) • Center to Center pupil distance 864 864mm (36 pixels) • Base angle tolerance: 10 arcsec (1/10pixel) • Thickness tolerance: 100 mm (1/10 pixel) • Vertex u 30.42°, N-BAK4 • Vertex v 29.08°, N-SK16 • FOV +/- 1 arcsec • Energy loss on edges < 10 % • Chromatism 0.9-3 mm at 0-69 deg • wl range (0.6 – 1.0 mm)
HO CCD detector I (EEV39 chip) SciMeasure Analytical Systems, Inc. EEV39 Marconi chip
Ron, dark current, sky backg. Ron only HO CCD detector II (EEV39 chip) 30x30 (bin 1) 15x15 (bin 2) 10x10 (bin 3)
HO CCD detector III (LLL CCD 60) • Two chip sent to Arcetri & Bologna from Marconi. • Control electronic development • in Arcetri: first test September 2002 • Optical test, QE, RON , fps..... at Bologna Obs. • 128x128 pixels • 1 kframe/s • RON < 1 e-
NGS/LGS Tip-Tilt Channel NOT TO SCALE
Pupil image diam. 100 mm 2.8 mm NGS/LGS Tip-Tilt Channel II Light from f45 beam +/- 1 arcsec FOV • APD sensitive area 200 mm • APD separation adjustable • around 2.8 mm • Pyramid angle 30 deg (SSK2) • Chromatism about 30 mm
3L CCD 65 • Sensitive area 11.5x8.6 mm • FOV 6.4x4.8 arcsec • Pixel size 20x30 mm • R band not well sampled Technical/Scientific viewer channel Option for technical viewer: CCD65 camera Detector limited !
On-Board positionings electronics Main On-Board positioning requirements • HO camera lens centering XYZ • TT pyramid centering XY • TT camera lens centering XYZ • Fast TT mirror • Filter wheels (2) • ADC rotator • Pupil Re-Rotator (?)
Telecentric lens mount, 84mm diam (1) • Sodium Laser Pick-Up mirror (2) • FISBA Calibration interferometer (3) • Interferometer Corner Cube (4) • LUCIFER dummy window (5) Auxiliary Units Main NGS auxiliary units
PI stages for Auxiliary devices Fisba Int. Focusing Laser Dichroic Int. Beam splitter
Auxiliary units mounts EDMUND OPTICS components taken just to perform a system layout study; other brands equivalent components wiil be evaluated before finalizing the mechanical design
NGS WFS Unit Laser pick-up HO NGS WFS BOARD LBT f15 beam TT SW telecentric lens mount Mirror for LGS WFS Light feeding LUCIFER dummy window FISBA Fizeau interferometer BS for NGS WFS calibration
Opto-Mechanical tolerances Pupil displacements rate in mm/mm or mm/arcsec Folding mirror Camera lens NGS board Lucifer window Refocusing triplet Pyramid tilt Pyramid polishing Telecentric lens
LGS WFS unit • Zenit angle range 0-70deg • WFS translation of 110mm • Laser dichroic insertion • Max sub. No. 30x30 • NGS board used for TT sensing Sodium Laser WFS unit F15 beam from LBT Laser dichroic NGS WFS
LGS WFS Channel NOT TO SCALE
LGS WFS unit LUCIFER window 210mm Laser Dichroic 210mm Focusing 110mm for Zenith angle 0—70 deg 720mm 864mm 12 mm 10 mm 4mm
NGS & LGS unit inside derotator Laser WFS Unit NGS WFS Unit FEA Analysis by ADS
LGS Unit NGS Unit FEA (ADS) EL=Zenith and ROT=0 deg. • TheAGW structure own deformation is of the order of 65 mm. • The NGS board total offset is 51 mm and its tilt is 15 asec (linear stage infinite stiffness).
FEA (ADS) EL=Zenith and ROT=90 deg. • TheAGW structure own deformation is of the order of 65 mm. • The NGS board total offset is 54mm and its tilt is 7.5 asec (linear stage infinite stiffness). NGS Unit
Pupil displacements rate • 10-1mm/arcsec • 10-2mm/mm EL=Zenith and ROT=0 – 15 deg offset123 mm, tilt is 26 asec @ rot=0 offset134mm, tilt is 30 asec @ rot=15 deg D offset / rot = 0.73 mm/deg Tilt / rot = 0.27 arcsec/deg Stages with finite Stiffness 50N/mm
DM Data Flow for non real-time operation Derotator WFS BCU Copper links/ Optical links MSS4 Switch RS232/485 PI Motion Control C862 (PI) BaySideMotion Control MCBL2805 (Faulhaber) AO Supervisor
Controllers & Device Server Ethernet link BaySide Controller PI controller
CCD39 80x80 pixels M2 LBT Crates SciMeasure Controller • 1800 Slopes x 32bit • @ 1kHz • 57.6 Mbit/s • 96 PIO, 4 pixel x • 12 bit @ 2.5MHHz • Controls signals Prog. logic Fiber comm. 2Gb/s DMA End of Slopes comp. BCU DSP Data Flow for real-time operation (CCD39) DM
RT Data Flow II LBT first light configuration: slope computer timing • Computation performed during acquisition of CCD frame, starting after half frames acquired • Computation faster than acquisition, therefore no latency after end of CCD acquisition • Could be further improved by pipelining the communication to M2
WFC aboard Adaptive Secondary 1 DSP for 2 actuators Reconstructor matrix 2 N Sx M C = Sy
RT Data Flow III • Three WFS configurations considered: • CCD 39, 80x80 pixel, no binning, 30x30 subaps, off-the-shelf acquisition board(4 pixels x 12 bits parallel acquisition @ 2 MHz = 8 Mpixel/s) • CCD 60, 128x128 pixel, 2x2 binning, 30x30 subaps, Arcetri’s acquisition board with fiber interface (1 pixels x 16 bits @ 16 MHz = 16 Mpixel/s) • CCD 60, 128x128 pixel, no binning, 60x60 subaps, Arcetri’s acquisition board with fiber interface (1 pixels x 16 bits @ 16 MHz = 16 Mpixel/s) • RTR types: • zonal, modal: pure integrator only • zonal, modal: time filtering one pole0, different freq. And dc gain for various acts or modes. • modal reconstructor
NGS Sistem Performance Simulations I • Atmospheric turbulence: 2 layers, wind vel.=15m/s,r0(@500nn)=0.15m (l/r0=0.67arcsec), Lo=40m; • Guide Star K5, Vmag 9.85—17.5; • Telescope: 8.25m diameter, obstructio ratio 0.11; • Pyramid Wavefront Sensor: tilt modulation 2,3 l/D • Reconstructor: 10x10sub 44,55, 66 LBT672 modes, 15x15sub: 78,105,136 LBT672 modes; 30x30sub: • 231, 351, 496 LBT672 modes; time filtering: pure integrator (gain=0.5)
NGS Sistem Performance Simulations II NAOS@VLT UT4 Hokupaha@Gemini South • Atmospheric turbulence: 7 layers, wind vel.=7--34m/s, • r0(@500nn)=0.166, (l/r0=0.62 arcsec); • Guide Star: mag 10--18; • Telescope: 7.9m diameter, obstructio ratio 0.13; • Curvature Wavefront Sensor • Atmospheric seeing 0.65 arcsec; • Guide Star: G0V, Vmag 10--18; • Telescope: 7.9m diameter, obstructio ratio 0.13; • Shack-Hartmann Wavefront Sensor: 7x7, 14x14