Download
1 / 8
80 likes | 216 Views
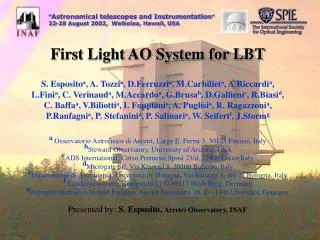
Adaptive Secondary. MMT Unit. Pyramid WFS. 1 st Light AO 4 LBT. MMT336 @MMT. WFS path. ACQ. Camera path. The two main system characteristic. Adaptive Secondary. Pyramid WFS. WFS camera EEV39/L3CCD. MMT Unit. Acquisition camera. WFS board (300x400) moveable for source acq.

E N D
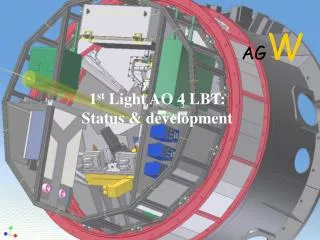
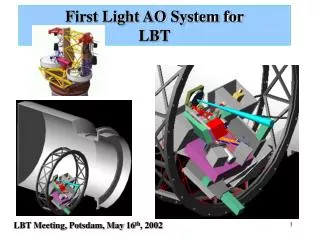
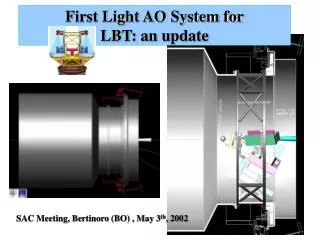
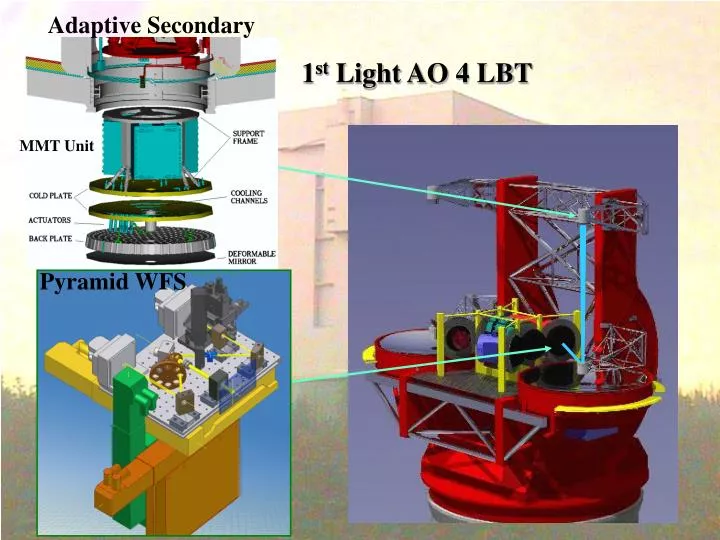
Adaptive Secondary MMT Unit Pyramid WFS 1st Light AO 4 LBT
MMT336 @MMT WFS path ACQ. Camera path The two main system characteristic Adaptive Secondary Pyramid WFS WFS camera EEV39/L3CCD MMT Unit Acquisition camera WFS board (300x400) moveable for source acq. Adj. samp. 30x30,15x15,10x10…(on-chip binning) RON 3.5 e-@650fps Lim R mag: 16.7 (0.2 on axis SR, 0.6” r0) Use of LLLCCD CCD60 128x128 LBT AdSec unit: LBT672 672 actuators 1ms average settling time Perform WF reconstruction
ELTs application of LBT AO components • Adaptive secondaries technologies to be used for • adaptive segments for ELTs. • Use of Pyramid WFS as co-phasing sensor for ELTs • segmented mirrors • Use of Pyramid sensor as High Order WFS > 100 subapertures • Use of LLL CCD in future ELTs AO system. Needs for • many pixels 256x256 and 1Kfps speed with low RON <1e- Fundings form European Community JRA1: High Order WFS comparison : Development of Adaptive secondaries having 1500 acts. FP6 : Co-phasing sensor to test at VLT (APE experiment) : Development of adaptive segments
Adaptive segments for M1 or M2 ? M5 4.2m 24 conj. @ 7.8km M6 2.4m 42 conj. @ 0km M6 2.5m (0km)act. Pitch 27mm6060 acts M5 4.2m (7.8km)act. Pitch 80mm2190 acts K band Adaptive surfaces Adaptive Primary: OWL case Using AdSec technique for OWL [pitch 10-100mm] P. Dierickx, SPIE 2002, Hawaii OWL OWL optical train M1 100m Spherical 1 M2 33.5m Flat 3 M3 8.2m Aspherical 12 M4 8.1m Aspherical 12 M5 4.2 m Aspheric 24 M6 2.4m Elliptical 42 Overall fitting error 290nm (Kband) courtesy A. Riccardi
PWFS The lab unit devoted to introduce A differential piston actuator for cube displacements Diff. Pist unit FISBA Reflecting surfaces of the cubes Co-Phasing Using Pyramid Sensor PWFS (2) assembly Aim of the set up is to measure at the same time a certain differential piston introduced using (3) with the two instrument FISBA (1) and PWFS (2). FISBA interf. Unit (1) Unit for (3) Differential piston
Initial signal value End signal value time WFS signal versus differential piston Pupil images on CCD 2D signal from pupils Dinamical behaviour of the DP signal on a single pixel when the DP is changing in time of more than 4 p. Signal computation uses the same formula used for wavefront Derivative estimation
Differantial piston measurement accuracy • Comparison of interferometer and pyramid measurements of the same differential piston,using: • LBT pyramid wavefront sensor (Y axis) and • FISBA interferometr (X axis). RMS of pyramid measurement with respect to fitting values is 15.8 nm (9 deg in phase angle)
Pyramid Sensor sensitivity Signal amplitude measured in lab as a function of the tilt modulation showing an inversely proportional law. The wavefront error due to pure photon noise can be stimated using the sensitivity measurements. In particular considering a segment of 2.1 m2, a 15 magnitude star and 30 s exposion, we found a residual differential piston error on the wavefront of 7.3 nm