Download
1 / 1
20 likes | 193 Views
Enhancing the capacity of on-ramp system by controlling the entrance gap Bin Jia a , Xingang Li a , Rui Jiang b , Ziyou Gao a a MOE Key Laboratory for Urban Transportation Complex Systems Theory and Technology, Beijing Jiaotong University, Beijing 100044, P.R.China E-mail: bjia@bjtu.edu.cn

E N D
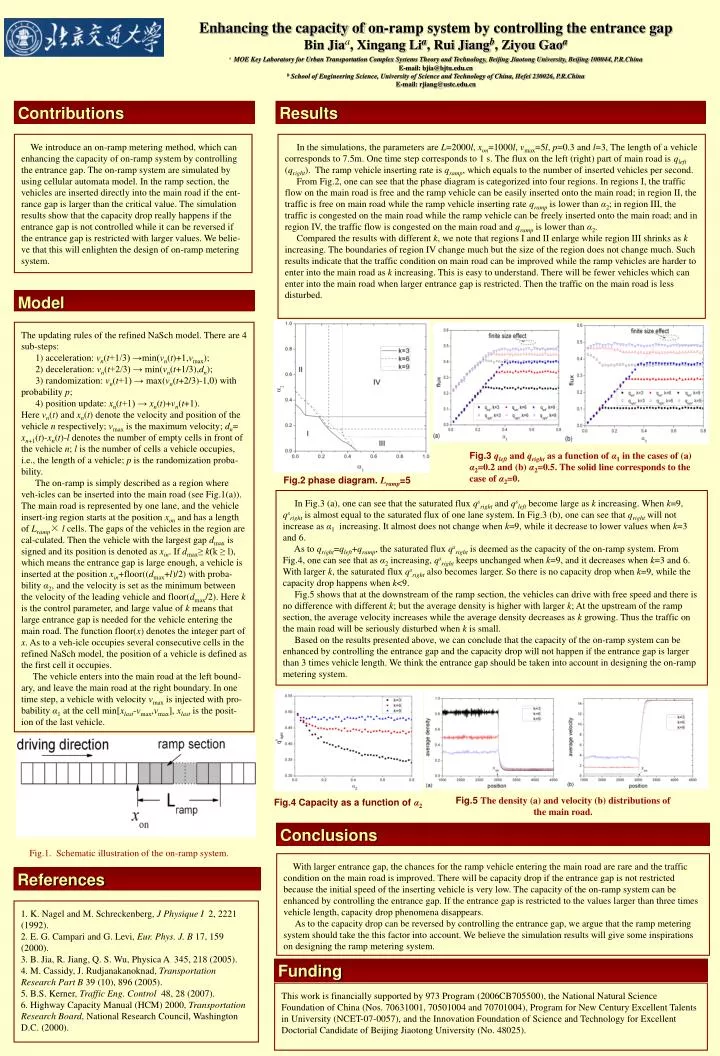
Enhancing the capacity of on-ramp system by controlling the entrance gap Bin Jiaa, Xingang Lia, Rui Jiangb, Ziyou Gaoa aMOE Key Laboratory for Urban Transportation Complex Systems Theory and Technology, Beijing Jiaotong University, Beijing 100044, P.R.China E-mail: bjia@bjtu.edu.cn b School of Engineering Science, University of Science and Technology of China, Hefei 230026, P.R.China E-mail: rjiang@ustc.edu.cn Contributions Results We introduce an on-ramp metering method, which can enhancing the capacity of on-ramp system by controlling the entrance gap. The on-ramp system are simulated by using cellular automata model. In the ramp section, the vehicles are inserted directly into the main road if the ent-rance gap is larger than the critical value. The simulation results show that the capacity drop really happens if the entrance gap is not controlled while it can be reversed if the entrance gap is restricted with larger values. We belie-ve that this will enlighten the design of on-ramp metering system. In the simulations, the parameters are L=2000l, xon=1000l, vmax=5l, p=0.3 andl=3, The length of a vehicle corresponds to 7.5m. One time step corresponds to 1 s. The flux on the left (right) part of main road is qleft (qright). The ramp vehicle inserting rate is qramp, which equals to the number of inserted vehicles per second. From Fig.2, one can see that the phase diagram is categorized into four regions. In regions I, the traffic flow on the main road is free and the ramp vehicle can be easily inserted onto the main road; in region II, the traffic is free on main road while the ramp vehicle inserting rate qramp is lower than α2; in region III, the traffic is congested on the main road while the ramp vehicle can be freely inserted onto the main road; and in region IV, the traffic flow is congested on the main road and qramp is lower than α2. Compared the results with different k, we note that regions I and II enlarge while region III shrinks as k increasing. The boundaries of region IV change much but the size of the region does not change much. Such results indicate that the traffic condition on main road can be improved while the ramp vehicles are harder to enter into the main road as k increasing. This is easy to understand. There will be fewer vehicles which can enter into the main road when larger entrance gap is restricted. Then the traffic on the main road is less disturbed. Model The updating rules of the refined NaSch model. There are 4 sub-steps: 1) acceleration: vn(t+1/3) →min(vn(t)+1,vmax); 2) deceleration: vn(t+2/3) →min(vn(t+1/3),dn); 3) randomization: vn(t+1) →max(vn(t+2/3)-1,0) with probability p; 4) position update: xn(t+1) → xn(t)+vn(t+1). Here vn(t) and xn(t) denote the velocity and position of the vehicle n respectively; vmax is the maximum velocity; dn= xn+1(t)-xn(t)-l denotes the number of empty cells in front of the vehicle n; l is the number of cells a vehicle occupies, i.e., the length of a vehicle; p is the randomization proba-bility. The on-ramp is simply described as a region where veh-icles can be inserted into the main road (see Fig.1(a)). The main road is represented by one lane, and the vehicle insert-ing region starts at the position xonand has a length of Lramp× l cells. The gaps of the vehicles in the region are cal-culated. Then the vehicle with the largest gap dmax is signed and its position is denoted as xin. If dmax≥ k(k ≥l), which means the entrance gap is large enough, a vehicle is inserted at the position xin+floor((dmax+l)/2) with proba-bility α2, and the velocity is set as the minimum between the velocity of the leading vehicle and floor(dmax/2). Here k is the control parameter, and large value of k means that large entrance gap is needed for the vehicle entering the main road. The function floor(x) denotes the integer part of x. As to a veh-icle occupies several consecutive cells in the refined NaSch model, the position of a vehicle is defined as the first cell it occupies. The vehicle enters into the main road at the left bound-ary, and leave the main road at the right boundary. In one time step, a vehicle with velocity vmax is injected with pro-bability α1at the cell min[xlast-vmax,vmax], xlastis the posit-ion of the last vehicle. Fig.3 qleft and qright as a function of α1 in the cases of (a) α2=0.2 and (b) α2=0.5. The solid line corresponds to the case of α2=0. Fig.2 phase diagram. Lramp=5 In Fig.3 (a), one can see that the saturated flux qsright and qsleft become large as k increasing. When k=9, qsrightis almost equal to the saturated flux of one lane system. In Fig.3 (b), one can see that qright will not increase as α1increasing. It almost does not change when k=9, while it decrease to lower values when k=3 and 6. As to qright=qleft+qramp, the saturated flux qsright is deemed as the capacity of the on-ramp system. From Fig.4, one can see that as α2 increasing, qsrightkeeps unchanged when k=9, and it decreases when k=3 and 6. With larger k, the saturated flux qsrightalso becomes larger. So there is no capacity drop when k=9, while the capacity drop happens when k<9. Fig.5 shows that at the downstream of the ramp section, the vehicles can drive with free speed and there is no difference with different k; but the average density is higher with larger k; At the upstream of the ramp section, the average velocity increases while the average density decreases as k growing. Thus the traffic on the main road will be seriously disturbed when k is small. Based on the results presented above, we can conclude that the capacity of the on-ramp system can be enhanced by controlling the entrance gap and the capacity drop will not happen if the entrance gap is larger than 3 times vehicle length. We think the entrance gap should be taken into account in designing the on-ramp metering system. Fig.5 The density (a) and velocity (b) distributions of the main road. Fig.4 Capacity as a function of α2 Conclusions Fig.1. Schematic illustration of the on-ramp system. With larger entrance gap, the chances for the ramp vehicle entering the main road are rare and the traffic condition on the main road is improved. There will be capacity drop if the entrance gap is not restricted because the initial speed of the inserting vehicle is very low. The capacity of the on-ramp system can be enhanced by controlling the entrance gap. If the entrance gap is restricted to the values larger than three times vehicle length, capacity drop phenomena disappears. As to the capacity drop can be reversed by controlling the entrance gap, we argue that the ramp metering system should take the this factor into account. We believe the simulation results will give some inspirations on designing the ramp metering system. References • K. Nagel and M. Schreckenberg, J Physique I 2, 2221 (1992). • E. G. Campari and G. Levi, Eur. Phys. J. B 17, 159 (2000). • B. Jia, R. Jiang, Q. S. Wu, Physica A 345, 218 (2005). • M. Cassidy, J. Rudjanakanoknad, Transportation Research Part B 39 (10), 896 (2005). • B.S. Kerner, Traffic Eng. Control 48, 28 (2007). • Highway Capacity Manual (HCM) 2000, Transportation Research Board, National Research Council, Washington D.C. (2000). Funding This work is financially supported by 973 Program (2006CB705500), the National Natural Science Foundation of China (Nos. 70631001, 70501004 and 70701004), Program for New Century Excellent Talents in University (NCET-07-0057), and the Innovation Foundation of Science and Technology for Excellent Doctorial Candidate of Beijing Jiaotong University (No. 48025).