Download
1 / 19
190 likes | 395 Views
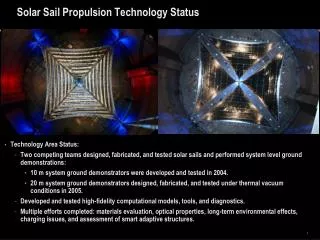
Pekka Janhunen Finnish Meteorological Institute, (Kumpula Space Centre ) ESA/ESTEC May 19, 2008. Electric Sail Technology Status Review. Contents. Tether manufacture Edward Haeggström et al., Univ. Helsinki, Electronics Res. Lab Tether reels Lutz Richter, DLR-Bremen Electron gun

E N D
Pekka Janhunen Finnish Meteorological Institute, (Kumpula Space Centre) ESA/ESTEC May 19, 2008 Electric SailTechnology Status Review
P.Janhunen, www.electric-sailing.com Contents • Tether manufacture • Edward Haeggström et al., Univ. Helsinki, Electronics Res. Lab • Tether reels • Lutz Richter, DLR-Bremen • Electron gun • Mikhail Zavyalov et al., IKI-Moscow • Tether Direction Sensors • Greger Thornell et al., ÅSTC-Uppsala • Dynamic Tether Simulations • Numerola Oy company & PJ • Orbital Calculations • Giovanni Mengali et al., Univ. Pisa • Integration of components
P.Janhunen, www.electric-sailing.com Tether material & tech selection • Initial material & technology study was made by Prof. S.-P. Hannula et al. at Helsinki Univ. Tech. • Technology options covered: • Laser-cut tether from metal sheet (efficiency? quality?) • Metal-clad fibres (CTE? radiation?) • Wire-wire bonding • Laser welding • Ultrasonic welding • Soldering (temperature range? CTE?) • Glueing (reliability? CTE?) • Wrap wire (not done at 20 um scale?) • Ultrasonic welding selected, others are fallbacks
P.Janhunen, www.electric-sailing.com Wire metal selection • Requirements: Good yield strength, preferably at least steel-class conductivity • No brittle-ductile transition at cold temperature • Generally: Alloying can improve yield strength, but usually destroys conductivity • Good-conductivity alloys: • 90% Cu, 10% Ag: Tensile strength 1000-1600 MPa, Density 9 g/cm3 • 99% Al, 1% Si: Tensile strength ~300 MPa, Density 2.7 g/cm3 • Dense metal has better micrometeoroid tolerance?
P.Janhunen, www.electric-sailing.com Tether manufacture • Prof. Edward Haeggström, Univ. Helsinki, Electronics Research Lab • Presented by Henri Seppänen
P.Janhunen, www.electric-sailing.com Tether reels • Preparatory work by Lutz Richter, DLR-Bremen • Baseline plan • Spinning reel, maybe with capstains • Outreeling only, or reeling both in and out • Ordinary or magnetic bearing • Other ideas also considered • Plan for proceeding • TRL 4 level work can commence when at least few metre piece of tether is available (either final-type or mockup, this is TBD)
P.Janhunen, www.electric-sailing.com Electron gun • Prof. Mikhail Zavyalov, Pavel Tujrujkanov, E.N. Evlanov, Space Research Institute IKI, Moscow • Three new designs produced, based on IKI heritage hardware: • 300 V low-voltage gun for ionospheric testing • 20 kV/2kW baseline model for solar wind • 40 kV/2kW enhanced voltage model for solar wind
P.Janhunen, www.electric-sailing.com Main properties of designed guns
P.Janhunen, www.electric-sailing.com 40 kV gun design
P.Janhunen, www.electric-sailing.com Electron gun summary • 40 kV, 2 kW, 50 mA gun: Mass 3.9 kg including power supply (2 kg) and radiator (0.9 kg) • LaB6 cathode lifetime: theoretically should be at least 10 years in high vacuum • Overall, electron gun situation looks good: gun which actually exceeds our power requirement (~400 W) several times has <4 kg mass. Could have more than one gun for redundancy.
P.Janhunen, www.electric-sailing.com Tether Direction Sensors • Greger Thornell, Henrik Kratz, Ångström Space Technology Center, Uppsala • Status: Preliminary TRL 3 -level analysis done in collaboration with ÅSTC and PJ • Initially, also Univ. Liege (P. Rochus et al.) looked at the topic • Main idea: Detect tethers optically with stereo camera, Reconstruct 3-D directions from images onboard • Purpose: Tether lengths must be actively fine-tuned to avoid their collisions. One must first detect them.
P.Janhunen, www.electric-sailing.com Tether Direction Sensors • TRL 3 analysis done, basically • Modest-sized cameras enough unless >10-15 AU distance • May have to mat-finish wires to create diffuse reflectance • Seeing root of tether enough to determine its direction • Seeing the tip would be good as tether breakage alarm
P.Janhunen, www.electric-sailing.com Mechanical simulations • Numerola Ltd company, Jyväskylä, Finland, together with P. Janhunen
P.Janhunen, www.electric-sailing.com Orbital calculations • University of Pisa, prof. Giovanni Mengali, Alessandro Quarta
P.Janhunen, www.electric-sailing.com Integration of components • General approach • Design whole s/c around electric sail • Add electric sail to existing s/c design • Spinup strategy • Spinup rockets • Siamese Twins • Placement of reels • At outer edge of s/c disk • At deployable booms at ends of solar panel arrays • High voltage path design (grounding plan) • Whole s/c at high positive potential • Only reels and electron gun at high positive potential
P.Janhunen, www.electric-sailing.com Control • Tethers have two degrees of freedom: in spinplane and perpendicular to spinplane • Thus we need two controls: potential (controls solar wind force) and length (controls angular speed) • Length fine-tuning strategies: • Reel in and out (needs reliable reeling of partly damaged tether or thicker monofilament base tether) • Reel out only (must have enough spare tether)
P.Janhunen, www.electric-sailing.com Flight algorithm • Inputs (partly redundant): • Pointing direction of each tether (direction sensor) • Spacecraft potential (electron detector) • DC current flowing in each tether • Thrust (accelerometer) • Output commands: • Overall thrust (electron gun current and voltage) • Individual tether potentials (potentiometers) • Tether length fine-tuning (reel motors) • Running in parallel: • S/C body spin state control so that it conforms with tethers (star sensor and ACS)
P.Janhunen, www.electric-sailing.com Technical Status Summary • Tether manufacture: Progressing well, required before test mission can fly • Tether reels: No serious problems seen, but must be done to demonstrate reeling of final-type tether • Electron gun: Straightforward (could use spare cathodes/guns for redundancy) • Tether direction sensors: Should be straightforward • Dynamic tether simulations: No problems seen, but should be done more comprehensively still • Orbital calculations: OK • Overall design: OK
P.Janhunen, www.electric-sailing.com Demonstration goals • Reel to reel tether production (10 m, 100 m, 1 km, 10 km) with quality control • Reliable reeling of the tether • After these, one can make decision to build test mission. Technological development risk remaining after this is small.