Download
1 / 19
• 190 likes • 379 Views
Prototype TOF test for tracker test @ KEK. Osaka university Atsushi Horikoshi. contents. magnetic field of Super Jacee shape of TOF timing resolution test @KEK-PS pi2 Analysis calibration for PhaseⅡ. PhaseⅡsetup (KEK-PS pi2). perpose measurement of momentum emittance reconstruction.

E N D
Prototype TOF test for tracker test @ KEK Osaka university Atsushi Horikoshi MICE tracker meeting 2005.3
contents • magnetic field of Super Jacee • shape of TOF • timing resolution test @KEK-PS pi2 • Analysis • calibration for PhaseⅡ
PhaseⅡsetup (KEK-PS pi2) • perpose • measurement of momentum • emittance reconstruction
super conducting magnetSuper JACEE , 1T vessel for ballon experiment side view φ850mm 2.1m front veiw
requirement of TOF • π/μ PID • 3σresolution • momentum scan • measurement of absolute value • resolution of momentum • keep high timing resolution in magnetic field
π/μPID • momentum of Phase Ⅱ • 300~600Mev/c • timing resolution for 3σPID • upstream 50ps • down strean 50ps 3σPID
momentum • timing resolution • upstream 50ps • downstream 50ps • momentum resolution • p<600MeV • Δp/p<5.6% 7 0 0.25 0.6
shape of TOF • to avoid reduction of timing resolution • fine mesh PMT (used BESS experiment) • R6504S (hamamatsu, 19DY) • PMT is parallel to magnetic field • long light guide
magnetic field • 1500Gauss ,almost parallel • satisfies the condition コイル
effect of the ground of iron@PMT thanks for Arimoto san 1T TOSCA
the effect of iron is small magnetic filed first second third magnetic field of PMT y geometry 0 iron
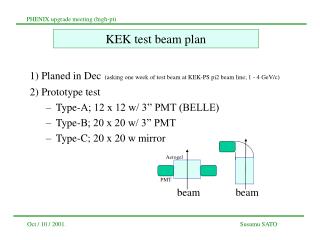
prototype test(KEK-PS pi2,2005 Feb) • guide7 simulation • timing resolution47ps • setup of beamline
analysis σ(tof-ref1) =64ps ⇒σ(tof)=49ps
position scan,timing resolution 90 ●:PMTR 〇:PMTL under ● weighted mean timing resolution [ps] 50 timing resolution is 50ps @ all position satisfied condition of PID distance from center [cm] 0 20 0 20
position scan 2 , npe • npe • 600~800 • very high npe • attenuation length • 118cm
effective velocity • Veff=15.3cm/ns • not good linearity
calibration for PhaseⅡ • we can’t determine hit position from external tracker in PhaseⅡ • calculation from tdc mean • Veff=15.3cm/ns • t(hitR)=tr-(20-z)/Veff • t(hitL)=tl-(20-z)/Veff • z=(tr-tl)xVeff/2
timing resolution using tdc mean • position is calculated from tdc , tofrt-toflt • timing resoluiton • 50~57ps • 48~52ps (using ref1 position) • position spread • -0.5~0.4cm
summary • timing resolution • 50ps @ all position • npe=600~800 • Veff=15.3cm/ns • calibration using tdc mean • 53ps @ all position , stability is not good