Download
1 / 43
430 likes | 560 Views
Stress Fluctuations in Sliding of Textured Objects and the Sense of Touch. Georges Debrégeas - Alexis Prevost R. Candelier, J. Scheibert, S. Leurent Laboratoire de Physique Statistique – ENS Paris Patrice Rey (CEA-LETI) Joël Frelat (LMM, Paris 6).

E N D
Tribology Gordon Conference 2010 Stress Fluctuations in Sliding of Textured Objects and the Sense of Touch Georges Debrégeas - Alexis Prevost R. Candelier, J. Scheibert, S. Leurent Laboratoire de Physique Statistique – ENS Paris Patrice Rey (CEA-LETI) Joël Frelat (LMM, Paris 6)
Tribology Gordon Conference 2010 Information transduction in tactile perception Object + motion SKIN DEFORMATIONS & VIBRATIONS NERVOUS SIGNALS REPRESENTATION
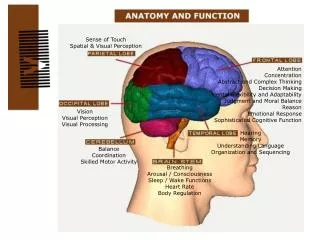
Tribology Gordon Conference 2010 Glabrous skin mechanoreceptors Merkel's cell complex Ruffini ending Meissner's corpuscule Pacinian corpuscule
Tribology Gordon Conference 2010 Glabrous skin mechanoreceptors Stimulus Stimulus t t Slow Adaptation Bolanowski et al., 1988 Fast Adaptation Merkel's cell complex Ruffini ending Meissner's corpuscule Pacinian corpuscule
Tribology Gordon Conference 2010 Roughness perception: the duplex theory • Coding of coarse roughness • > ~200µm • SA I (Merkel) channel • Resolution limited by the small receptive field (few hundred µm) • Spatial coding (static) • Fairly independent of finger's motion • Coding of fine roughness • < ~200µm • Mediated by Pacinian corpuscules exclusively • Requires active tactile exploration • Intensity coding Hollins and Bensmaia, 2008
Tribology Gordon Conference 2010 Outline Questions : 1 – How can one relate the physicalproperties of the object and exploratory conditions to the mechanicalsignalsexperiencedby mechanoreceptive nerve endings. 2 – What are the consequencesof thisfilteringprocess on the transduction and neural encoding of tactile information. 1 – Biomimetic tactile sensing – design and calibration. 2 – Dynamic impulse response. 3 – Response to randomly rough substrates. 4 – A possible role for fingerprints. 5 – Conclusions and perspectives.
Tribology Gordon Conference 2010 The biomimeticapproach Real finger Artificial finger MEMS sensor
Tribology Gordon Conference 2010 Response to a localizedforce Indentation protocol: Apply a ponctual force at on the surface with a rod. Receptive fields measured by our MEMS sensors Predicted receptive field for a ponctual sensor in a perfectly elastic material
Tribology Gordon Conference 2010 Response to a localizedforce Indentation protocol: Apply a ponctual force at on the surface with a rod.
Tribology Gordon Conference 2010 Response to a localizedforce Indentation protocol: Apply a ponctual force at on the surface with a rod. Without exploration: roughly the same response for the 10 sensors
Tribology Gordon Conference 2010 A linear model for tactile transduction Hertz contact The stress felt by the sensor is given by: + Coulomb law: + Green function for a ponctual force at the surface:
Tribology Gordon Conference 2010 A linear model for tactile transduction Hertz contact The stress atthe sensor location reads: + Coulomb law: + Green function for a ponctual force at the surface:
Tribology Gordon Conference 2010 Dynamic impulse response.
Tribology Gordon Conference 2010 Dynamic impulse response.
Tribology Gordon Conference 2010 Dynamic impulse response.
Tribology Gordon Conference 2010 Dynamic impulse response u Perturbation in force signal associatedwitha small, isolateddefect : The modification in stress profile at the interface reads Perturbation in force signal for a sensorat : The responsehighlydepends on the sensor's position within the contact zone
Tribology Gordon Conference 2010 Dynamicimpulse response – normal stress Left Middle Right Experiment Model
Tribology Gordon Conference 2010 Dynamicimpulse response – tangential stress Left Middle Right Experiment Model
Tribology Gordon Conference 2010 Midline profiles Experiment Model
Tribology Gordon Conference 2010 Receptivefieldvariability in cortical neurons DiCarlo et. al., 1998 The journal of Neuroscience « The shape, area and strength of exitatory and inhibitory receptive fields regions ranged widely. »
Tribology Gordon Conference 2010 Response to randomlyrough substrates Scanning over a binarypatternedsubstrate ?
Tribology Gordon Conference 2010 The Volterra decomposition The Volterra kernels give a mapping from to . The Volterra series is the analog of the Taylor series, but for functionals: NB: it is hard to extract the Volterra kernels ...
Tribology Gordon Conference 2010 The Wiener decomposition For Gaussian white noise inputs, the Wiener kernels are orthogonal. They can be computed through correlations: ...
Tribology Gordon Conference 2010 Extracting the linearkernel measured Predicted
Tribology Gordon Conference 2010 Consequences of skin patterning (e.g. fingerprints) Artificialfingerprints Square-wavegratings (period 220mm) on the skin'ssurface Smooth skin Fingerprinted skin
Tribology Gordon Conference 2010 Linear model of mechanical transduction Square wavegratings: Interfacial stress profile: Force signal :
Stimulus- signal responsefunction Tribology Gordon Conference 2010
Stimulus- signal responsefunction Tribology Gordon Conference 2010
Tribology Gordon Conference 2010 Numericalillustration of the filteringprocess
Tribology Gordon Conference 2010 Numerical illustration of the filteringprocess
Tribology Gordon Conference 2010 Numerical illustration of the filteringprocess
Tribology Gordon Conference 2010 Numerical illustration of the filteringprocess
Tribology Gordon Conference 2010 Numerical illustration of the filteringprocess
Tribology Gordon Conference 2010 2 mm Consequence of fingerprints for fine texture perception • Typical inter-ridge distance l ~ 500 µm • « Natural » exploratoryfinger/substratevelocity • V ~ 10 cm/s • Frequency f = V / l ~ 200 Hz • Order of the best frequency of Pacinianfibers • Pacinianfibers = mediate the coding of fine texture Scenario Fingerprints select one spatial frequency Velocity chosen to match Pacinian best response
Tribology Gordon Conference 2010 Conclusions • Biomimeticapproachallowed to characterize the linearmechanical transduction of texture information, and clarify the rolesplayed by intrinsicsensor’sresponse, interfacial contact stress fieldand skin topography. • But : • - Limited to binarytopography. • - Non-lineareffectsshouldbe important (stress couplingwithin the contact zone, normal stress dependence of the friction coefficient, etc.) Reverse correlationshouldallow to probe that. • Important open question : • How does the tactile system deal withsuchcontextdependentvariability of individualsensors’ response. Whatencodingstrategiesmayyield a stable representation of the probed surface.
Tribology Gordon Conference 2010 Comparingbiomimetic and humantouch • Can one relate the subcutaneous stress fieldmeasuredwith the biomimeticsensorwithactualneurographic data ? JP Roll - LNH – Marseille
Tribology Gordon Conference 2010 Comparingwhisker and digital touch Dan Shulz – Yves Boubenec UNIC - Gif-sur-Yvette
Tribology Gordon Conference 2010 Rodents whisker touch Daniel Shulz (Gif-CNRS) Wolfe & Feldman, ‘08
Tribology Gordon Conference 2010 F Johnson & Phillips, 1981
Tribology Gordon Conference 2010 The cochlea Georg von Békésy, ‘47 outer hair cells inner hair cells Nobili, Mammano and Ashmore, ‘98
Tribology Gordon Conference 2010 …Back to the actual finger Can we see this effect on a real finger ? Communicative & Integrative Biology, 2009