Download
1 / 52
520 likes | 695 Views
Friday March 24 20-minute test on material in lectures 1-7 during lecture. Systems of Particles 9.8-11 Collisions 9.12 Rocket propulsion Rotational Motion 10.1 Rotation of Rigid Body 10.2 Rotational variables 10.4 Rotation with constant acceleration. Summary Lecture 9.

E N D
Friday March 24 20-minute test on material in lectures 1-7 during lecture Systems of Particles 9.8-11 Collisions 9.12 Rocket propulsion Rotational Motion 10.1 Rotation of Rigid Body 10.2 Rotational variables 10.4 Rotation with constant acceleration Summary Lecture 9 Problems:Chap. 9: 27, 40, 71, 73, 78 Chap. 10: 6, 11,16, 20,21, 28, 28
coll isions
But Energy is always conserved??? Collisions Elastic collisions Energy and momentum are conserved Inelastic collisions Only momentum is conserved
Elastic collision In 1 dimension
Elastic Collision 1D Before m1 v1i m2 v2i =0 After m1 v1f m2 v2f Mom. Cons. m1v1i = m1v1f + m2v2f………………(1) m2v2f = m1(v1i- v1f)…………………(2) Energy Cons ½ m1v1f2 + ½ m2v2f2 = ½ m1v1i2 ½ m2v2f2 = ½ m1(v1i2 - v1f2)
Mom. Cons. m1v1i = m1v1f + m2v2f………………(1) m2v2f = m1(v1i- v1f)…………………(2) Energy Cons ½ m1v1f2 + ½ m2v2f2 = ½ m1v1i2 ½ m2v2f2 = ½ m1(v1i2 - v1f2) Mult. by 2 and factorise m2v2f2 = m1(v1i- v1f) (v1i+ v1f) ……(3) Divide equ. (3) by (2) v2f = v1i + v1f…………….…(4) V1i is usually given, so to find v2f we need to find an expression for v1f. Get this from equ. (1). m1v1f = m1v1i - m2v2f Substitute this form of v1f into equ 4 v2f = v1i + v1i – m2/m1 v2f v2f(1 + m2/m1) = 2v1i
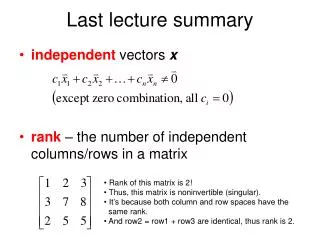
Analyze the equations If m1>> m2 v2f 2v1i v1f v1i If m2>>m1 v2f 0 v1f -v1i If m1= m2 v2f v1i v1f 0
CM Collision viewed from Lab. Ref. frame m1 v1i m2 v2i =0 vcm What is Vcm? Mom of CM = mom of m1 + mom of m2 (m1 + m2 ) Vcm = m1v1i + m2v2i
vcm CM Collision viewed from Lab. Ref. frame m1 v1i m2 v2i =0
Collision viewed from Lab. Ref. frame Note that the CM moves at constant vel Because there is no EXTERNAL force acting on the system
Collision viewed from Lab. Ref. frame Note that the CM moves at constant vel Because there is no EXTERNAL force acting on the system
Let’s observe the elastic collision from the view point of the centre of mass
Collision viewed from CM Ref. frame Note that the CM is at rest
inelastic collision In 1 dimension
vcm CM m1 v1i m2 v2i =0 What is Vcm? Mom of CM = mom of m1 + mom of m2 (m1 + m2 ) Vcm = m1v1i + m2v2i
vcm CM Completely inelastic collision m1 v1i m2 v2i Observing from the Lab. reference frame
Note that the CM moves at constant vel Because there is no EXTERNAL force acting on the system Observing from the Lab. reference frame
Note that the CM moves at constant vel Because there is no EXTERNAL force acting on the system Observing from the Lab. reference frame
Let’s observe the inelastic collision from the view point of the centre of mass
Collisions in 2 dimensions Elastic billiard balls comets a-particle scattering
Impact parameter m2v2f m1v1i 2 1 m1v1f before after Elastic collisions in 2-D Momentum is conserved Consider x-components m1v1i= m1v1f cos 1 + m2v2f cos 2 Consider y-components 0= -m1v1f sin 1 + m2v2f sin 2 Since elastic collision energy is conserved 7 variables! 3 equations
Collisions in 2 dimensions Inelastic Almost any real collision! An example: Automobile collision
mA= 830 kg Vf = va = 62 kph q mB = 550 kg vB = 78 kph pf Pfy= pf sinq pB q pA Pfx= pf cosq
= pB q mAvA pf Pfy= pf sinq pA Pfx= pf cosq Cons. Momentum ==> pA + pB = pf X component PA = Pf cosq mAvA = (mA+ mB) vf cosq………….(1) Y component PB = Pf sinq mBvB = (mA+ mB) vf sinq………….(2) ____________________ mAvA = (mA+ mB) vf cosq Divide equ (2) by (1) Gives q = 39.80
mAvA Cons. Momentum ==> pA + pB = pf X component PA = Pf cosq mAvA = (mA+ mB) vf cosq………….(1) Y component PB = Pf sinq mBvB = (mA+ mB) vf sinq………….(2) pf = Pfy= pf sinq pB q = 39.80 pA q Pfx= pf cosq Gives Vf = 48.6 kph Use equ 2 to find Vf
d Can the investigators determine who was speeding? Conservation of Energy ½ mvf2 = f.d f = mN = m(mA + mB) g http://www.physics.ubc.ca/~outreach/phys420/p420_96/danny/danweb.htm
Burns fuel at a rate v v+D v U = Vel. of gas rel. to rocket Force on Rocket Dm An example of an isolated system where momentum is conserved! IN THE EARTH REF. FRAME Vel of gas rel me = vel of gas rel. rocket- vel of rocket rel me V = U - v Mom. of gas = mV =m(U - v) = - change in mom. of rocket (impulse or p) Impulse is mom. transfer (p) So since F = dp/dt, p= Fdt i.e.F dt = m(v - U) F dt = v dm - U dm
Now the force pushing the rocket is F = Note: since m is not constant i.e. F dt = v dm + m dv F dt = v dm - U dm This means: If I throw out a mass dm of gas with a velocity U, when the rocket has a mass m, the velocity of the rocket will increase by an amount dv.
= logex = 1/x dx Thus e = 2.718281828… vf = U ln This means: If I throw out a mass dm of gas with a velocity U, when the rocket has a mass m, the velocity of the rocket will increase by an amount dv. If I want to find out the TOTAL effect of throwing out gas, from when the mass was mi and velocity was vi, to the time when the mass is mf and the velocity vf, I must integrate.
2 Speed in units of gas velocity Reducing mass (mf = 0) 1 Constant mass (v = at) .8 1 .6 .2 .4 Fraction of mass burnt as fuel
An example Mi = 850 kg mf = 180 kg U = 2800 m s-1 dm/dt = 2.3 kg s-1 Thrust = dp/dt of gas = U dm/dt =2.3 x 2800 = 6400 N F = ma Thrust –mg = ma 6400 – 8500 = ma a = -2100/850 = -2.5 m s-2 Initial acceleration F = ma ==> a = F/m = 6400/850 = 7.6 m s-2 Final vel.
The axis is not translating. We are not yet considering rolling motion Not fluids,. Every point is constrained and fixed relative to all others Every point of body moves in a circle nFIXED Rotation of a body about an axis RIGID
Y reference line fixed in body q2 q1 X Rotation axis (Z) The orientation of the rigid body is defined by q. (For linear motion position is defined by displacementr.)
The unit of is radian (rad) There are 2 radian in a circle 2 radian = 3600 1 radian = 57.30
Y q2 q1 X Rotation axis (Z) Angular Velocity At time t2 At time t1 w is a vector
Angular velocity w wis a vector wis rate of change of q units of w…rad s-1 wis the rotational analogue of v
Angular Acceleration Dw w1 w2 a a is a vector direction of change in w. Units of a-- rad s-2 ais the analogue of a
• = -1 – 0.6t + .25 t2 e.g at t = 0 = -1 rad = d/dt = - .6 + .5t e.g. at t=0 = -0.6 rad s-1
0= 33¹/³ RPM An example where is constant =3.49 rad s-2 = 8.7 s = -0.4 rad s-2 How long to come to rest? How many revolutions does it take? = 45.5 rad = 45.5/27.24 rev.
Relating Linear and Angular variables s q r q and s Need to relate the linear motion of a point in the rotating body with the angular variables s = qr
s w v r Relating Linear and Angular variables w and v s = qr Not quite true. V, r, and w are all vectors. Although magnitude of v = wr. The true relation isv = wx r
v = x r w r v
A Ay = Asin B Ax = Acos Vector Product C = A x B A = iAx + jAyB = iBx + jBy So C = (iAx + jAy) x (iBx + jBy) = iAx x(iBx + jBy)+ jAy x(iBx + jBy) = ixi AxBx + ixj AxBy + jxi AyBx + jxj AyBy now ixi = 0 jxj = 0 ixj = kjxi = -k C= ABsin So C = kAxBy - kAyBx = 0 - kABsin
a r Since w = v/r this term = v2/r(or w2r) This term is the tangential acceln atan. (or the rate of increase of v) Relating Linear and Angular variables a and a The centripital acceln of circular motion. Direction to centre