Download
1 / 10
100 likes | 241 Views
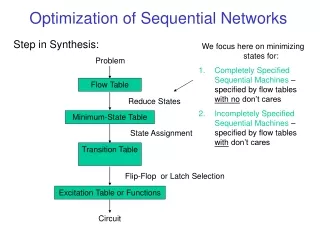
Processing Rate Optimization by Sequential System Floorplanning. Jia Wang 1 , Ping-Chih Wu 2 , and Hai Zhou 1 1 Electrical Engineering & Computer Science Northwestern University, U.S.A 2 Cadence Design Systems Inc, U.S.A. Motivation. Optimize the performance of a sequential system.

E N D
Processing Rate Optimization by Sequential System Floorplanning Jia Wang1, Ping-Chih Wu2, and Hai Zhou1 1Electrical Engineering & Computer Science Northwestern University, U.S.A 2Cadence Design Systems Inc, U.S.A
Motivation • Optimize the performance of a sequential system. • Optimize the frequency (clock period). • Minimal period retiming. ([4] Lin et al. ICCAD’03) • Clock skew scheduling. • When the frequency is given but cannot be met by the above methods. • Global interconnects need to be pipelined while the functionality of the system should not change. • Latency insensitive design (LIS). ([6] [7] Carloni et al. ICCAD’99, DAC’00) • Wire-pipelining correcting method. ([5] Nookala et al. DAC’04) • Throughput is traded-off for frequency. • Optimizations are applied after delays are estimated. • More optimization possibilities in floorplanning and placement when interconnect delays dominate. • Placement driven by sequential timing. ([9] Hurst et al. ICCAD’04) • Floorplanning for throughput. ([8] Casu et al. ISPD’04) ISQED 2006
Processing Rate • How to measure the performance of a sequential system? • Frequency? Throughput varies. • Throughput? Frequency varies. • Use Processing Rate to measure the performance. • Defined as the length of processed input sequence per unit time. • Equal to frequency times throughput in a synchronous system. • An upper bound of the processing rate is derived as: • G is the graph describing the sequential system. For a wire e, w(e) is the number of flip-flops on it and d(e) is the delay of it. • Independent of afterward optimization methodologies. • Independent of the operating frequency. ISQED 2006
Floorplanning for Processing Rate (FPR) • Find a floorplan to maximize the upper bound. • Intuitively, designs with larger bounds are superior to the ones with smaller bounds. • Good fidelity between the bound and the processing rate makes our approach effective. • Optimizing the bound means at the stage of floorplanning, • Not necessary to determine what methodology to apply later. • Not necessary to know the operating frequency. • Save design time since it is not necessary to repeatedly perform floorplanning according to the different afterward optimization methodologies and operation frequencies. ISQED 2006
Overview of the Floorplanning Algorithm • Simulated annealing (SA) based floorplanner. • Adjacent Constraint Graph (ACG) as the floorplan representation. • A representation for general floorplans. • Common ACG perturbations that change the geometric relationships locally. • Local changes enable incremental evaluation of the bound. • Cost function to be optimized includes the area of the floorplan and the processing rate upper bound. • When the floorplan is required to be fit into a fixed outline, a outline cost is included in the cost function as well: • W and H are the width and height of the current floorplan respectively. • W* and H* are the desired width and height respectively. ISQED 2006
Adjacent Constraint Graph (ACG) • A constraint graph containing both horizontal and vertical constraint edges satisfying that, • Exactly one constraint relation between every pair of modules. • No transitive edges. • No cross, which is an edge configuration if allowed may introduce quadratic number of edges to the graph. • Reduced ACG simplifies ACG by removing a group of edges that can be inferred from other edges. • An example: • The floorplan. • Its ACG. • Its Reduced ACG. ISQED 2006
Direct Bound Evaluation • The minimum cycle ratio problem. • Need to be solved many times in simulated annealing (SA). • More than 700K times for our largest benchmark. • Previous work [8] only estimates but not computes the ratio in SA. • Many polynomial-time algorithms available. • However, choose Howard’s algorithm. • Not proved to be polynomial-time but among the fastest ones in practice. • Howard’s algorithm iteratively finds the ratio. • Maintain a policy graph. • A sub-graph of G where there is exactly one edge starting from any vertex. • Its minimum cycle ratio is obtained by enumerating its cycles. • is an upper bound of the minimum cycle ratio of G. • Check if there is a negative cycle in G with edge weights w(e)- d(e). • No. Then is the minimum cycle ratio. • Yes. Build a new policy graph containing one such cycle. • Keep a vertex labeling to interleave the above two steps. ISQED 2006
Incremental Bound Evaluation • The initial policy graph in Howard’s algorithm: • Constructed heuristically. • Intuitively, an initial one with a smaller tends to converge quicker. • The floorplans in simulated annealing: • ACG perturbations change the geometric relationships locally. • Most likely, the cycle ratio will not change much across perturbations. • Reuse final policy graph as the initial one for the floorplan after perturbation. • Reduce running time by 29% on average. • Columns time are in seconds. • Columns #iter. are the total number of iterations in Howard’s algorithm. ISQED 2006
Experiments • Six GSRC floorplanning benchmarks: • n10, n30, n50, n100, n200, n300. • Including 10, 30, 50, 100, 200, 300 modules respectively. • Each n-pin net is decomposed into n-1 2-pin nets. • The last pin of the net is treated as the sources of the nets after decomposition. • Other n-1 pins as sinks. • Exactly one flip-flop on each net. • Wire delays are computed as Manhattan distances between pins. • Pins are assumed to be at the centers of the modules. • Evaluate the processing rate under different operating frequencies for comparison with [8]. • Frequencies are modeled by critical length. • The distance that a signal travels in one clock cycle. • 30%, 50%, 70%, and 100% of the square root of the total module area. ISQED 2006
Experiments (Cont.) • Results reported in the format 1−throughput/white space (%). • The smaller the number, the better. • Dominating solutions are highlighted. • One floorplan for all the frequencies in our approach. • One floorplan for each frequency in [8]. ISQED 2006