Download
1 / 28
280 likes | 471 Views
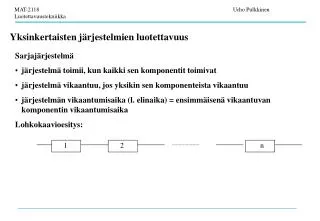
Yksinkertaisten järjestelmien luotettavuus. Sarjajärjestelmä järjestelmä toimii, kun kaikki sen komponentit toimivat järjestelmä vikaantuu, jos yksikin sen komponenteista vikaantuu järjestelmän vikaantumisaika (l. elinaika) = ensimmäisenä vikaantuvan komponentin vikaantumisaika

E N D
Yksinkertaisten järjestelmien luotettavuus • Sarjajärjestelmä • järjestelmä toimii, kun kaikki sen komponentit toimivat • järjestelmä vikaantuu, jos yksikin sen komponenteista vikaantuu • järjestelmän vikaantumisaika (l. elinaika) = ensimmäisenä vikaantuvan komponentin vikaantumisaika • Lohkokaavioesitys: 1 2 n
Yksinkertaisten järjestelmien luotettavuus • Sarjajärjestelmän toimintatodennäköisyys: • oletetaan komponenttian vikaantumisajat riippumattomiksi satunnaismuuttujiksi SIIS: SARJAJÄRJESTELMÄN TOIMINTATODENNÄKÖISYYS ON SEN KOMPONENTTIEN TOIMINTATODENNÄKÖISYYKSIEN TULO
Yksinkertaisten järjestelmien luotettavuus • Sarjajärjestelmän vikaantumisajan jakauma: • oletetaan komponenttian vikaantumisajat riippumattomiksi satunnaismuuttujiksi
Yksinkertaisten järjestelmien luotettavuus • Sarjajärjestelmän vikaantumisajan hazardifunktio: • oletetaan komponenttian vikaantumisajat riippumattomiksi satunnaismuuttujiksi SARJAJÄRJESTELMÄN VIKAANTUMISAJAN HAZARDIFUNKTIO ON KOMPONENTTIEN HAZARDIFUNKTIOIDEN SUMMA
Yksinkertaisten järjestelmien luotettavuus Sarjajärjestelmän vikaantumisaika: SARJAJÄRJESTELMÄN VIKAANTUMISAIKA ON KOMPONENTTIEN VIKAANTUMISÀIKOJEN MINIMI
Yksinkertaisten järjestelmien luotettavuus • Rinnakkaisjärjestelmä • järjestelmä toimii, kun yksikin sen komponenteista toimii • järjestelmä vikaantuu, kun kaikki sen komponentit ovat vikaantuneet vikaantuu • järjestelmän vikaantumisaika (l. elinaika) = viimeisenä vikaantuvan komponentin vikaantumisaika
Yksinkertaisten järjestelmien luotettavuus Rinnakkaisjärjestelmän lohkokaavioesitys 1 1 2 2 n
Yksinkertaisten järjestelmien luotettavuus • Rinnakkaisjärjestelmän vikaantumistodennäköisyys • komponenttien vikaantumisajat oletetaan riippumattomiksi satunnaismuuttujiksi RINNAKKAISJÄRJESTELMÄN VIKAANTUMISTODENNÄKÖISYYS ON KOMPONENTTIEN VIKAANTUMISTODENNÄKÖISYYKSIEN TULO
Yksinkertaisten järjestelmien luotettavuus • Rinnakkaisjärjestelmän toimintatodennäköisyys • komponenttien vikaantumisajat oletetaan riippumattomiksi satunnaismuuttujiksi
Yksinkertaisten järjestelmien luotettavuus • Rinnakkaisjärjestelmä • järjestelmän hazardifunktiota ei voida kirjoittaa yksinkertaiseen muotoon • vikaantumisaika (l. elinaika) = viimeisenä vikaantuvan komponentin vikaantumisaika:
Yksinkertaisten järjestelmien luotettavuus • Sekajärjestelmät • sekajärjestelmät koostuvat erilaisista sarja- ja rinnakkaiskytkennöistä • sekajärjestelmien toimintatodennäköisyys voidaan laskea tunnistamalla niistä sarjaan ja rinnkakkain kytkettyjä kokonaisuuksia, joiden toimintatodennäköisyys lasketaan edellä esitetyillä tavoilla • sekajärjestelmien toimintatodennäköisyyksiä ei voida esittää ”siisteinä” komponenttien toimintatodennäköisyyksien funktioina
Yksinkertaisten järjestelmien luotettavuus Esimerkki sekajärjestelmän lohkokaavioesityksestä 4 1 1 5 2 3 6
Yksinkertaisten järjestelmien luotettavuus Esimerkki sekajärjestelmän lohkokaavioesityksestä ja sen laskennasta 4 1 1 5 2 3 6 1 B A
Yksinkertaisten järjestelmien luotettavuus Esimerkki sekajärjestelmän lohkokaavioesityksestä ja sen laskennasta 1 B A C B
Yksinkertaisten järjestelmien luotettavuus • k/n-järjestelmä: • järjestelmä toimii, jos ja vain jos vähintään k sen n:stä komponentista toimii • järjestelmä vikaantuu, jos ja vain jos vähintään (n-k+1) sen komponenteista vikaantuu • rinnakkaisjärjestelmä = 1/n-järjestelmä
Yksinkertaisten järjestelmien luotettavuus Esimerkki k/n-järjestelmästä: 2/3-järjestelmä, 1 1 2 2 2/3 3
Rakennefunktiot • edellä esitetty tapa laskea järjestelmien toimintatoidennäköisyyksiä tulee helposti monimutkaiseksi jos järjestelmien koko kasvaa • tarvitaan yksinkertaisempi esitystapa • rakennefunktiot kuvaavat järjestelmien toiminnan/vikaantumisen komponenttien toiminnan/vikaantumisen funktiona • lähtökohta: kuvataan komponenttien toiminta binäärimuuttujalla: • n:n komponentin muodostavan järjestelmän tila voidaan siis kuvata tyhjentävästi tilavektorilla:
Rakennefunktiot • järjestelmän tila voidaan kuvata binäärifunktiolla: • funktiota( ) kutsutaan rakennefunktioksi tai lyhyesti rakenteeksi
Rakennefunktiot • sarjarakenne l. sarjajärjestelmän rakennefunktio: • rinnakkaisrakenne:
Rakennefunktiot • k/n-rakenne • esimerkki: 2/3-rakenne
Koherentit rakenteet • rakennefunktioihin ei kannata ottaa mukaan sellaisia komponentteja, jotka eivät vaikuta järjestelmän toimintakykyyn • rakennefunktioissa mukana vain relevantteja komponentteja • komponentit, jotka eivät ole relevannteja ovat irrelevatteja • jos komponentti on irrelevantti, niin
Koherentit rakenteet Määritelmä: Rakenne on koherentti, jos kaikki sen komponentit ovat relevantteja, ja jos se on ei-vähenevä kaikkien argumenttiensa suhteen Koherentin rakenteen ominaisuuksia 1. Koherentille rakenteelle pätee: 2. Koherentille rakenteelle pätee:
Koherentit rakenteet 3. Koherentille rakenteelle pätee: Olkoot x ja y tilavektoreita ja merkitään Tällöin
Katkosjoukot, minimikatkosjoukot, polkujoukot, minimipolkujoukot • merkitään järjestelmän komponenttien joukkoa C = {1,2,…,n} Määritelmä. PolkujoukkoP on sellainen C:n osajoukko komponentteja, joiden yhtäaikainen toiminta varmistaa koko järjestelmän toiminnan. Polkujoukko on minimipolkujoukko jos sitä ei voida supistaa ilman, että se menettäisi asemansa polkujoukkona. Määritelmä. KatkosjoukkoP on sellainen C:n osajoukko komponentteja, joiden yhtäaikainen vikaantuminen aiheuttaa koko järjestelmän vikaantumisen. Polkujoukko on minimikatkosjoukko jos sitä ei voida supistaa ilman, että se menettäisi asemansa katkosjoukkona.
Katkosjoukot, minimikatkosjoukot, polkujoukot, minimipolkujoukot Esimerkki: 1 3 2 Polkujoukot: {1,3}, {2,3}, {1,2,3} Minimipolkujoukot: {1,3}, {2,3} Katkosjoukot: {3}, {1,3}, {2,3}, {1,2}, {1,2,3} Minimikatkosjoukot: {3}, {1,2}
Minimipolkujoukko- ja -katkosjoukkoesitykset Olkoot järjestelmän minimipolkujoukot P1, P2,…, Ppja minimikatkosjoukot K1, K2,…, Kk . Liitetään minimipolkuun Pj , j=1,…,p binäärifunktio: ja minimikatkosjoukkoon Kj, j=1,…,kbinäärifunktio:
Minimipolkujoukko- ja -katkosjoukkoesitykset Koska järjestelmä toimii jos ja vain jos vähintään yksi sen minipolkurakenteista on toimiva, niin Koska järjestelmä vikaantuu, jos ja vain jos vähintään yksi sen minimikatkosjoukkorakenteista vikaantuu, niin:
Vaihtoehtoiset rakennefunktioiden esitystavat • rakennefunktiot voidaan esittää myös ”vikaantumislogiikan” suhteen, jolloin komponentin tilaa kuvaava binäärimuuttuja saa arvon 1, kun komponentti on vialla (ja arvon 0 muulloin) • lisäksi on mahdollista käyttää loogisia tai Boolen muuttujia, jolloin erityisesti vikapuiden rakennefunktiot ja niiden minimikatkosjoukot voidaan löytää helpommin