Download
1 / 19
190 likes | 481 Views
Torque. Rotational Equilibrium. Rotational Dynamics. Rolling without Slipping. Angular Speed and Acceleration. Kinetic Energy. Cross Products If you know the components If you know the magnitude and angle. A. B. Right-hand Rule. For positive charges…

E N D
Torque Rotational Equilibrium Rotational Dynamics Rolling without Slipping Angular Speed and Acceleration Kinetic Energy
Cross Products If you know the components If you know the magnitude and angle
A B Right-hand Rule • For positive charges… • Point the fingers of your right hand in the direction of the vector A. • Curl your fingers toward the direction of the vector B. • The cross-product is given by the direction of your thumb.
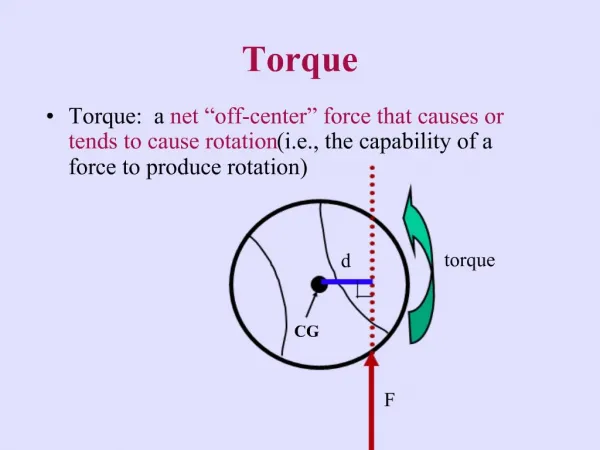
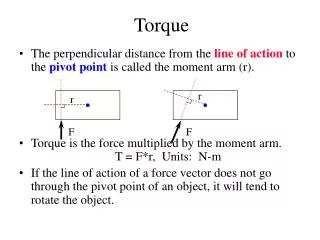
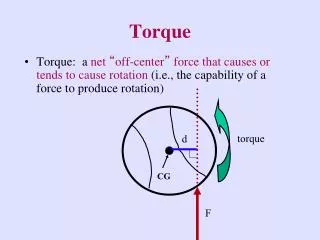
Definition of Torque Torque is a measure of the ability of a force to cause an object to turn or rotate. In equation form its is given by Note that it is a vector!
Lever Arm Since we have a magnitude for the torque of We might wish to define a new length so that This length is called the lever arm and is defined by the equation
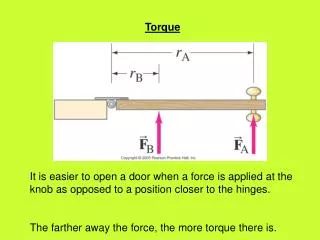
An example of finding torque Consider a man lifting a board that is sitting on the ground from one end. Assume that the length of the board is L and that the man lifts with a force, F, at an angle, Φ, from the horizontal. What is the torque on the board?
An example of finding torque Consider a man lifting a board that is sitting on the ground from one end. Assume that the length of the board is L and that the man lifts with a force, F, at an angle, Φ, from the horizontal. What is the torque on the board? First, we must find the fulcrum (the point of rotation) and the radius of the circle made by the point on the board where the force is acting (R).
An example of finding torque Consider a man lifting a board that is sitting on the ground from one end. Assume that the length of the board is L and that the man lifts with a force, F, at an angle, Φ, from the horizontal. What is the torque on the board? Next, we can continue the line of the force backward to the point shown and draw a perpendicular line through the point of rotation. This is the lever arm which is equal to R sinΦ.
An example of finding torque Consider a man lifting a board that is sitting on the ground from one end. Assume that the length of the board is L and that the man lifts with a force, F, at an angle, Φ, from the horizontal. What is the torque on the board? The magnitude of the torque is then given by the equations or
An example of finding torque Consider a man lifting a board that is sitting on the ground from one end. Assume that the length of the board is L and that the man lifts with a force, F, at an angle, Φ, from the horizontal. What is the torque on the board? The direction of the torque is given by the right-hand rule. In this case it is out of the page.
Rotational Equilibrium In order to keep an object from rotating, we must have a net torque of zero. This does NOT mean that we must have It does mean that
Rotational Dynamics The net torque may not be zero in which case the object will rotate with an angular acceleration given by This does NOT mean that we must have It does mean that
Motion of an object that is rolling without slipping An object that is rolling without slipping can be treated as follows 1. Consider the translational motion of the centerof mass.
Motion of an object that is rolling without slipping An object that is rolling without slipping can be treated as follows 2. Consider the rotation of the object about its center of mass.
Angular Displacement The angular displacement of point at the edge of an object that is rolling without slipping is related to the translational displacement of its center of mass (and the point of contact) by the equation where R is the distance between the point of contact and the axis of rotation.
Angular Speed The angular speed of an object that is rolling without slipping is related to the translational speed of its center of mass by the equation where R is the distance between the point of contact and the axis of rotation.
Angular Acceleration The angular acceleration of an object that is rolling without slipping is related to the translational acceleration of its center of mass by the equation where R is the distance between the point of contact and the axis of rotation.
Kinetic Energy The kinetic energy of an object that is rolling without slipping is given by The change in this kinetic energy is equal to the work done on the object.