Download
1 / 20
440 likes | 1.42k Views
Capítulo 15 CINEMÁTICA DE LOS CUERPOS RÍGIDOS. z. A ’. En la translación de un cuerpo rígido, todos los puntos del cuerpo tienen la misma velocidad y la misma acelera-ción en cualquier instante dado. B. q. P. f.

E N D
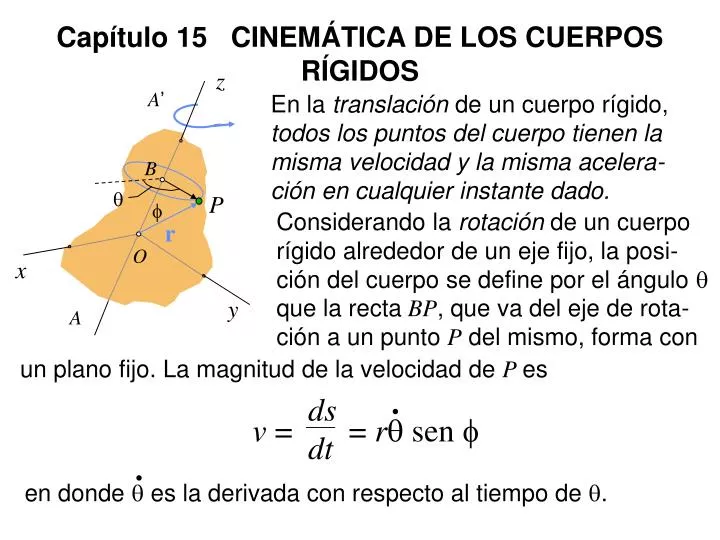
Capítulo 15 CINEMÁTICA DE LOS CUERPOS RÍGIDOS z A’ En la translación de un cuerpo rígido, todos los puntos del cuerpo tienen la misma velocidad y la misma acelera-ción en cualquier instante dado. B q P f Considerando la rotación de un cuerpo rígido alrededor de un eje fijo, la posi-ción del cuerpo se define por el ángulo q que la recta BP, que va del eje de rota-ción a un punto P del mismo, forma con r O x y A un plano fijo. La magnitud de la velocidad de P es . ds dt v = = rq sen f . en donde q es la derivada con respecto al tiempo de q.
. ds dt v = = rq sen f z A’ La velocidad de P se expresa como B dr dt q P f v = = wxr r O x en donde el vector y . A w = wk = qk está dirigido a lo largo del eje fijo de rotación y representa la velocidadangular del cuerpo.
. z dr dt v = = wxr A’ w = wk = qk B Denotando por a la derivada dw/dtde la velocidad angular, se expresa la aceleración de P como q P f r O x a = ax r + wx (wxr) y A Si se deriva w y se recuerda que k es de magnitud y dirección constantes, se encuentra que .. . a = ak = wk = qk El vector a representa la aceleraciónangular del cuerpo y está dirigido a lo largo del eje fijo de rotación.
y Considérese el movimiento de una losa representativa ubicada en un plano per-pendicular al eje de rotación del cuer-po. La velocidad angular es perpendi-cular a la losa, de modo que la veloci-dad del punto P de la misma es v = wkxr P O r x w = wk v = wkxr en donde v está contenida en el plano de la losa. La aceleración del punto P se puede resolver en componentes tangencial y normal, respectivamente iguales a at = akxr y P an= -w2r O x w = wk at = akxr at = ra a = ak an= -w2r an = rw2
La velocidadangular y la aceleraciónangular de la losa se pueden expresar como dq dt w = d2q dt2 dw dt a = = o bien dw dq w = a Con frecuencia se encuentran dos casos particulares de rota-ción: la rotaciónuniforme y la rotaciónuniformemente acelera-da. Se pueden resolver los problemas referentes a cualquiera de estos movimientos usando ecuaciones semejantes a las del movimiento rectilíneo uniforme y el movimiento rectilíneo uni-formemente acelerado de una partícula, en donde x, v y a se reemplazan por q, w y a.
vA vA y’ wk (fijo) vB vA x’ A rB/A A A vB/A B B B Movimiento plano = Translación con A + Rotación alrededor de A El movimientoplanomás general de una losa rígida se puede considerar como la suma de una translación y una rotacion. Se puede suponer que la losa mostrada se translada con el punto A, girando simultáneamente alrededor de A. Se concluye que la velocidad de cualquier punto B de la losa se puede expresar como vB = vA + vB/A en donde vA es la velocidad de A yvB/Aes la velocidad relativa de B con respecto a A.
vA vB/A vA y’ wk (fijo) vB vA x’ vB vA A rB/A A A vB/A B B B Movimiento plano = Translación con A + Rotación alrededor de A vB = vA + vB/A Denotando por rB/Ala posición de B con relación a A, se obser-va que vB/A = wk x rB/AvB/A = (rB/A )w = rw La ecuación fundamental que relaciona las velocidades abso-lutas de los puntos A y B con la velocidad relativa de B con res-pecto a A se puede expresar en la forma de un diagrama vecto-rial y usarse para resolver problemas relacionados con el movi-miento de varios tipos de mecanismos.
C Otro enfoque para la resolución de problemas relacionados con las ve-locidades de los puntos de una losa rígida en movimiento plano se basa en la determinación del centroins-tantáneo de rotación,C, de la losa. C vB B vB A vA vA
y’ aA wk aA ak aB/A aB x’ A A A (aB/A)n (aB/A)t aA B B B Movimiento plano = Translación con A + Rotación alrededor de A El hecho de que cualquier movimiento plana de una losa rígida se puede considerar como la suma de una translación de ella con referencia al punto A y una rotación alrededor de A se usa para relacionar las aceleraciones absolutas de dos puntos cua-lesquiera A y B de la losa y la aceleración relativa de B con res- pecto a A. aB = aA + aB/A en donde aB/Aconsta de una componentenormal (aB/A)n, de mag- nitud rw2 y dirigida hacia A, y una componente tangencial (aB/A)t, de magnitud ra y perpendicular a la recta AB.
(aB/A)n aB aB/A (aB/A)t aA y’ aA wk aA ak aB/A aB x’ A A A (aB/A)t (aB/A)n aA B B B Movimiento plano = Translación con A + Rotación alrededor de A aB = aA + aB/A La ecuación fundamental que relaciona las aceleraciones absolutas de los puntos A y B con la aceleración relativa de B con respec-to a A se puede expresar en la forma de un diagrama vectorial y usarse para determinar las aceleraciones de puntos dados de diver- sos mecanismos.
(aB/A)n aB aB/A (aB/A)t aA y’ aA wk aA ak aB/A aB x’ A A A (aB/A)t (aB/A)n aA B B B Movimiento plano = Translación con A + Rotación alrededor de A aB = aA + aB/A No se puede usar el centro instantáneo de rotación, C, para la determinación de las aceleraciones ya que, en general, el punto Cno tiene aceleración cero.
Y La razón de cambio de un vector es la misma con respecto a un marco fijo de referencia y con respecto a un marco en transla-ción. La razón de cambio de un vector con respecto a un marco de referencia en rotación es dife-rente. La razón de cambio de un y Q A j x i W O X k vector general Q, con respecto a un marco fijo OXYZ y con respecto a un marco Oxyz en rota-ción con una velocidad angular W, es Z z . . (Q)OXYZ = (Q)Oxyz + WxQ La primera parte representa la razón de cambio de Q con res-pecta al marco en rotación Oxyz y la segunda parte, W x Q, es inducida por la rotación de ese marco.
. Y vP/F= (r)Oxy Considérese el análisis bidimen-sional de una partícula P que se mueve con respecto a un marco F que gira con una velocidad an-gular W alrededor de un eje fijo. La velocidad absoluta de P se puede expresar como vP’ = Wxr P’ P y r x O X W vP = vP’ + vP/F en donde vP = velocidad absoluta de la partícula P vP’ = velocidad del punto P’ del marco en movimiento F que coincide con P vP/F= velocidad de P relativa al marco en movimien- to F Se obtiene la misma expresión para vP si el marco está en translación en lugar de en rotación.
. Y vP/F= (r)Oxy Cuando el marco está en rota-ción, la expresión para la ace-leración de P contiene un tér- mino adicionalacllamado ace-leracióncomplementaria o aceleración deCoriolis. vP’ = Wxr P’ P y r x O X aP = aP’ + aP/F + ac W en donde aP = aceleración absoluta de la partícula P aP’ = aceleración del punto P’ del marco en movi- miento F que coincide con P aP/F= aceleración de P relativa al marco en movi- miento F . ac = 2Wx (r)Oxy= 2WxvP/F = aceleración complementaria o de Coriolis,
aP = aP’ + aP/F + ac . Y vP/F= (r)Oxy vP’ = Wxr aP = aceleración absoluta de la partícula P P’ P y aP’ = aceleración del punto P’ del marco en movimiento F que coincide con P r x O aP/F= aceleración de P relativa al marco en movimiento F X W . ac = 2Wx (r)Oxy= 2WxvP/F Como W yvP/Fson perpendiculares entre sí en el caso del mo- vimiento plano, la aceleración de Coriolis tiene una magnitud ac = 2WvP/F. Su dirección se obtiene al hacer girar 90o el vec-tor vP/Fen el sentido de la rotación del marco en movimiento. Se puede usar la aceleración de Coriolis para analizar el mo- vimiento de mecanismos que contienen partes que se desli-zan entre sí.
dr dt v = = wxr w a En tres dimensiones, el desplazamiento más general de un cuerpo rígido con un punto fijo O es equivalente a una rota-ción del cuerpo alrededor de un eje que pasa por O. Se pueden definir la veloci-dad angular w y el ejeinstantáneo de ro- P r O tación del cuerpo en un instante dado. La velocidad de un punto P del cuerpo se puede expresar como Si se deriva esta expresión, la aceleración es a = axr + wx (wxr) Como la dirección de w cambia de instante a instante, la acele- ración angular a no está dirigida, en general, a lo largo del eje instantáneo de rotación.
Y’ El movimientomás general de un cuer-po rígido en el espacio es equivalente, en cualquier instante dado, a la suma de una translación y una rotación. Con-siderando dos partículas A y B del cuerpo a w B Y rB/A A X’ Z’ vB = vA + vB/A rA O en dondevB/Aes la velocidad de B re-lativa a un marco AX’Y’Z’ sujeto a A y de orientación fija. Denotando por rB/A X Z el vector de posición de B relativo a A, se escribe vB = vA + wxrB/A en donde w es la velocidad angular del cuerpo en el instante con-siderado. Por un razonamiento semejante, laaceleración de B es aB = aA + aB/A aB = aA + axrB/A + wx (wxrB/A) o
Y y P r A j x i W O X k Z z Considérese el movimiento tridimen-sional de una partícula P relativo a un marco Oxyz que gira con una velo-cidad angular W con respecto al mar-co fijo OXYZ. La velocidad absoluta vP de P se puede expresar como vP = vP’ + vP/F en donde vP = velocidad absoluta de la partícula P vP’ = velocidad del punto P’ del marco en movimien- to F que coincide con P vP/F= velocidad de P relativa al marco en movimiento F
Y y P La aceleración absoluta aP de P se expresa como r A j x i W aP = aP’ + aP/F + ac O X k en donde aP = aceleración absoluta de la partícula P Z aP’ = aceleración del punto P’ del marco en movimiento F que coincide con P z aP/F= aceleración de P relativa al marco en movimiento F . ac = 2Wx (r)Oxy= 2WxvP/F = aceleración complementaria (de Coriolis) La magnitud acde la aceleración de Coriolis no es igual a 2WvP/F excepto en el caso especial en el que Wy vP/F son per-pendiculares entre sí.
Y’ Las ecuaciones y P vP = vP’ + vP/F rP/A x y A Y aP = aP’ + aP/F + ac X’ Z’ rP siguen siendo válidas cuando el marco Axyz se mueve de una manera conocida, pero arbitra-ria, con respecto al marco fijo OXYZ, siempre que el movimien- rA z O X Z to de A esté incluido en los términos vP’ y aP’ que representan la velocidad absoluta y la aceleración del punto coincidente P’. Los marcos giratorios de referencia son útiles en particular en el estudio del movimiento tridimensional de los cuerpos rígidos.