Download
1 / 14
140 likes | 264 Views
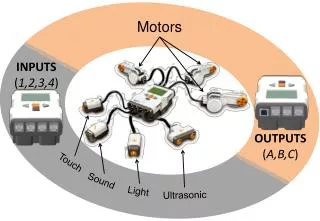
Introduction to Inputs. By Mike He, Anindya Basu and Christopher Lin. PWM’s. Voltage. Signal. Ground. Inputs are carried through a 3-wire called a PWM (Pulse width modulator) cable to the Robot Controller. Connectors. Crimps.

E N D
Introduction to Inputs By Mike He, Anindya Basu and Christopher Lin
PWM’s Voltage Signal Ground • Inputs are carried through a 3-wire called a PWM (Pulse width modulator) cable to the Robot Controller Connectors Crimps
Wires come in different colors, but you should be able to tell what they mean. • Red normally voltage • Yellow or white normally Signal • Ground normally black • Two kinds, male and female (a.k.a. with pin and without) • Color coding important, easier to troubleshoot if there is a problem
Analog Signal vs. Digital Signal • Analog is from 0 to 255 • Value differs depending on the voltage sent, often from 0 to 5 volts. • Analog Signal is used for motors and some sensors. • Digital is from 0 to 1, and the voltage differs from HIGH to LOW. • Digital signal can be used for simple sensors, such as limit switches, or more complicated sensors using extremely fast pulses
Digital Signal and Binary • Digital signal pulses REALLY FAST • Pulses converted to 0 and 1 • Sequence of pulses then converted to a number • Ex: 0001 is 1, 0010 is 2 etc. • RC treats a specific number of pulses as one set of inputs
IFI Robot Controller • Old RC • Received inputs through digital and analog slots • Programmable using C.
NI Compact RIO • New Robot Controller • Modular system • Programmable using C, C++, or Labview (graphical) • Beefier!
AND NOW INTRODUCING (Sorta)...
Vex and Easy C • You’ll be programming this in EasyC and later, many you have already programmed the vex • Easy C graphical programming environment • Easier for people without prior programming experience to program
Some sensors you will be using on the VEX • Bumper/Limit Switch • Both digital signals, alert you when they is pressed. • Useful for detecting when a object strikes the sensor • Ex: stop the motors after an elevator hits full bottom
Debugging • If there is a problem, it is probably YOUR fault, not the RC or the computer or mine(maybe…) • Good programming practices very important, hieroglyphics vs english • Easy understandability helps debugging • Bad code may be interesting, but it is hard to figure out • Follow logic of the code
Debugging (continued) • Print out values to get a sense of what the program is doing • You might get unexpected results, figure out why it occurs • Make sure everything is doing what you want it to do, no loopholes • Comment things, so others may help you debug and understand your code faster
Saving Code • A few things to remember: • Easy to recognize/read and in a accessible location, normally this is under the R file (we’ll show you later) • Safe often, and don’t save on the same file (save as, not save).