Download
1 / 15
150 likes | 267 Views
Summary of "TCSC Controller Design for Damping Interarea Oscillations" by Yan, Liu & McCalley. 1. What is the problem being studied?. FACTS controller design and location for damping interarea modes. A TCSC application example is provided. 2. Is it an important problem? Why or why not?.

E N D
Summary of "TCSC Controller Design for Damping Interarea Oscillations" by Yan, Liu & McCalley
1. What is the problem being studied? • FACTS controller design and location for damping interarea modes. • A TCSC application example is provided.
2. Is it an important problem? Why or why not? • Yes. • With deregulation and increased system loading, interarea problems are becoming more significant. FACTS devices have a great deal of potential to influence the system response in this time frame.
2. Continued • They also provide the unique advantage from the deregulation point of view, of being located within the transmission system (as opposed to a generation facility).
3. What are the main results? • Provides a method for ranking various input/output pairs for control of interarea oscillations. • Tie line flow was more effective an input signal than the speed difference signal.
3. Continued • Modal and functional sensitivity methods are used to determine the location and design of a TCSC controller. These methods, originally applied to PSS design, were adapted for FACTS controller applications.
4. What method is used to produce the results? • Functional sensitivities or the residue method was used for determining controller inputs and outputs and locations. • Modal sensitivities are used to determine the candidate lines.
4. Continued • Residues are used to determine the controller design parameters, and two different inputs are tested. • The design is tested by determining the maximum line loading without the TCSC and with each of the two control schemes.
4. Continued - 2 • Assume the transfer function between the kth input and the jth output of a system are given by Gjk(s). • Then Gjk(s) = Sum[Rijk/(s - li)] (i = 1, 2, 3, ... n). • The residues (Rijk's) can determined using Rijk = Cj ti vi Bk .
5. What are the assumptions in the paper? Are they realistic? • In the design of the controller, the controller gain (K) is assumed to be small.
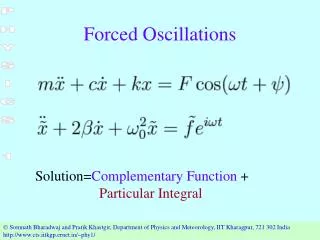
5. Continued • They also assumed that the system and control loop is as in the figure below.
5. Continued - 2 • The form of H(s) is {sT/(1 + sT)}[(1 + sT1)/(1 + sT2)]m where m is the number of compensation stages • At each stage the angle of each compensation block should be less than 60°. • The assumptions seem to be fairly realistic.
6. How sensitive are the results to the assumptions? • The authors don't comment or provide much insight to this. • The application is tested for a range of conditions to find the maximum transfer capabilities. • The "best" controller (the one using the tie-line flow input) did have the smaller gain of the two.
7. What did you learn from this paper? • This paper verifies many of the ideas discussed in this class and shows the power of linear analysis in designing controllers for large systems. • The results show the potential of the TCSC for improving system flexibility and oscillations. • The better results for tie-line flow may or may not indicate a general trend.
8. Describe the similarities and differences of this paper? • This paper is aimed at the interarea oscillation problem and provides a fairly simple scheme for designing a linear controller based on linear analysis. • It does not deal with the TCSC model itself, or with nonlinear theory as many papers do. • It is a well-written paper.