Download
1 / 28
280 likes | 459 Views
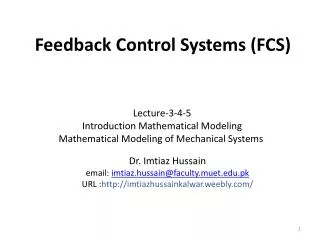
Feedback Control of Computing Systems M3: Systems and Transfer Functions. Joseph L. Hellerstein IBM Thomas J Watson Research Center, NY hellers@us.ibm.com September 21, 2004. +. Controller. Notes Server. Notes Sensor. -. This module focuses on systems: components that transform signals.

E N D
Feedback Control of Computing SystemsM3: Systems and Transfer Functions Joseph L. Hellerstein IBM Thomas J Watson Research Center, NY hellers@us.ibm.com September 21, 2004
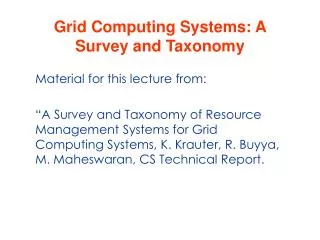
+ Controller Notes Server Notes Sensor - This module focuses on systems: components that transform signals Motivating Example The problem Want to find y(k) in terms of KI so can design control system that is stable, accurate, settles quickly, and has small overshoot. But this is difficult to do with ARX models. The Solution Use a different representation
M3: Lecture
Agenda • Motivation and definition • Examples of transfer functions • Interpretations of transfer functions • Transfer function for systems in series • Steady state gain • Poles • Settling times Reference: “Feedback Control of Computer Systems”, Chapter 3.
U(z) Y(z) G(z) Motivation and Definition Motivation: ARX model relates u(k) to y(k) Transfer function expresses this relationship in the z domain y(k) = (a)y(k-1) +(b)u(k-1) y(k) u(k) A transfer function is specified in terms of its input and output. Intuition for G(z): Effect of “kicking the system”
3 3 Constant Transfer Function y(k) = au(k) u(k) y(k) U(z) Y(z) a
z-1 z-1 Time-Delay Transfer Function y(k) = u(k-1) y(k) u(k) U(z) Y(z) z-1
3z-1 3z-1 Combining Simple Transfer Functions y(k) = au(k-1) y(k) u(k) U(z) Y(z) az-1
U(z) Y(z) 3z-1+2z-2 Additional Terms in T.F. y(k) = au(k-1)+bu(k-2) y(k) u(k) U(z) Y(z) az-1+bz-2
U(z) Y(z) z/(z-0.5) U(z) Y(z) z/(z-a) Geometric Sum of T.F. y(k) = u(k)+au(k-1)+a2u(k-2)+… y(k) u(k) U(z) Y(z) 1 + az-1 + a2z-2 + …
T.F. Interpretation 1 U(z) Y(z) z/(z-0.5) Signal generated by an impulse input Example:
Example: U(z) Y(z) z/(z-0.5) 0.125z-3 0.25z-2 0.5z-1 1 T.F. Interpretation 2 Sum of effects at different time delays
U(z) Y(z) Complicated Transfer Functions Decompose into a sum of geometrics • Partial fraction expansion allows rational polynomials to be decomposed into a sum of geometrics • Poles of the original polynomial are the poles of the geometrics
Converting ARX Models into T.F. Approach Replace u(k+n) by znU(z) and replace y(k+n) by znY(z) Express Y(z) as a function of U(z) Divide both sides by U(z) Example:
Example 1: Converting T.F. into ARX Model Approach Express transfer function as Y(z)=G(z)U(z) Multiply both sides by the denominator of G(z) Convert Y(z) and U(z) into the time domain Example 2:
? u(k) U(z) W(z) Y(z) U(z) Y(z) G(z) H(z) G(z)H(z) Transfer Functions In Series T.F. provide an easy way to analyze the behavior of complex structures.
M3: Labs Part 1
Lab 1: T.F. for Notes Server + Notes Sensor Notes Server Notes Sensor y(k) u(k) w(k) Find the transfer function H(z) from u(k) to y(k) 1. Notes Server T.F. Compare simulation of Server + Sensor H(z) 2. Notes Sensor T.F. 3. Compute the product
M3: Lecture Continued
Poles of a Transfer Function Poles: Values of z for which the denominator is 0. Example: Poles: 0.3, 0.2 • Poles • Determine stability • Major effect on settling time, overshoot • Larger |a| • Slower convergence • |a|>1 • Does not converge • a<0 • Oscillates
ssg of G(z) is Example: Steady State Gain (ssg) of a Transfer Function from final value thm Definition and result: Steady state divided by steady state input. U(z) Y(z) G(z)
Definition and result: Time until an input signal is within 2% of its steady state value z/(z-1) Y(z) G(z) (unit step) Examples: Settling Time (ks) of a System from geometric do more time steps
Summary of Key Results • Interpretation of transfer functions • Signal created by an impulse (impulse response) • Sum of time delayed effects • Encoding of a ARX model • Transfer functions in series • End-to-end T.F. is the product of the individual T.F. • Steady state gain • Magnitude of effect on the output for a unit change in input • Settling time • Time until steady state is reached after applying a unit input
Adding signals: If {a(k)} and {b(k)} are signals, then {c(k)=a(k)+b(k)} has Z-Transform A(z)+B(z). U(z) Y(z) G(z) A(z) + C(z) + U(z) U(z) W(z) Y(z) Y(z) B(z) G(z) G(z)H(z) H(z) Transfer functions in series is equivalent to ssg of G(z) is Key Results for LTI Systems(LTI = Linear Time Invariant) Stable if |a|<1, where a is the largest pole of G(z)
M3: Labs Part 2
Causality Constraint The degree of z in the numerator of a transfer function cannot exceed that of the denominator Why? Hint: Find the ARX model for a T.F. that violates the causality constraint.
Settling Time Questions Notes Server Notes Sensor y(k) u(k) w(k) 1. How do the sum of the settling times of the Notes Server and the Notes Sensor compare to the settling time of these two systems in series? Why? 2. How does the settling time of the Notes Sensor change if the coefficient of w(k) is changed to 0.9? What if the coefficient of y(k) is changed to 0.4? 3. How does the settling time of the combined (series) system change if the coefficient of w(k) in the Notes Sensor changes to 0.7?