Download
1 / 21
210 likes | 331 Views
Control performance assessment in the presence of valve stiction. Wei Yu, David Wilson & Brent Young Industrial Information & Control Centre New Zealand diwilson @ aut.ac.nz. Question for the day? . What do you do if your control loop looks like this …?. Characteristic triangular wave.

E N D
Control performance assessment in the presence of valve stiction Wei Yu, David Wilson & Brent Young Industrial Information & Control Centre New Zealand diwilson@aut.ac.nz
Question for the day? What do you do if your control loop looks like this …? Characteristic triangular wave Controller plant • Re-tune the loop, Service the valve, or just ignore it
Context & rationale • Many control loops are badly tuned • We are lazy • Conditions change • Valves get sticky • Should I retune or service the valve ? • Retuning is easier, service requires a shutdown • What is my expected economic return? • Calculate a CPA
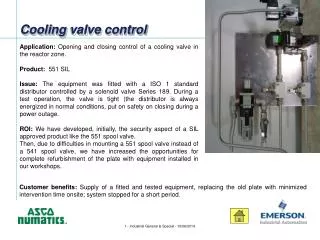
What is valve stiction ? Vague term meaning valve problems Stiction: sticky/friction Typically valve sticks & jumps
Plant under consideration Linear plant with known delay With disturbance model disturbance • NL plants in CPI are smooth & benign • Key NL are in actuators + plant We want to control this system as best we can
Control Performance Assessment (CPA) • Use a minimum variance controller as a performance benchmark • Estimate from closed-loop data • Must know plant delay • Harris Index • Zero is bad, 1 is probably “too good”, 0.7 is optimal • Calculate from disturbance model Estimate from ARIMA identification Direct from data But we need to know the deadtime, b
How do I estimate s2mv with stiction ? • Why bother? • Gives an indication on how good the loop would be if the valve was maintained • Is it worth shutting down & servicing the valve? • How to remove the nonlinearities? • Existance of the control invariant for NL systems (Harris & Yu) • Run a smoothing spline through the data • Identify periods when valve is stuck fast
System under consideration (With stiction) disturbance Valve stiction Nonlinear phenomena Un-observable measurements + + Controller plant
Our scheme • Fit a non-parametric spline curve to y • OK for non-differential nonlinearities • Remove nonlinearity with spline • Adjust smoothing to “just remove” NL • Use linearity check • Compute s2MV from dsequence
Removing the nonlinearity Unobservable, but smoothish Fit a smooth curve to approximate z Reconstruct d from y-z
Establishing linearity & Gaussianity The power spectrum A(f) and bispectrumB(f1,f2) of this series are The squared bicoherence is
Example: A plant with a sticky valve disturbance measurements + + Controller plant Valve stiction
Testing the method Statistical tests Increasing level of smoothness
Monte-Carlo Simulation results Estimation gets worse True value
Waiting for steady-state Select periods at steady-state Use only this data for the identification
Areas of long periods We are interested in the long periods when we might reach steady state Increasing noise “Islands” of long periods
Period = 10t contour Too much noise, so valve is continually “dancing” Uninteresting areaPeriod < 10t Optimum noise level Valve too “jumpy”
Does it work? Uncertainty bounds True value Good estimation due to longer sequences Bad estimation due to excessive nonlinearities
Conclusions • Estimate the CPA even with stictionnonlinearities • Do we need to shut down? • Heuristic curve smoothing is OK • Extracting steady-state is better provided: • Sequences are long enough • System is stable and relatively short time constants • Need to know: • Approximate process deadtime • Approximate dominant time constants • Now we know if it is worthwhile to service the valve.