Download
1 / 15
150 likes | 174 Views
This comprehensive guide provides insights into servo motors, including their construction, working principles, control mechanisms using PWM, and how to modify servos for continuous rotation. Learn about their applications and how to connect and calibrate them with an Arduino.

E N D
Servos The material presented is taken from a variety of sources including: http://www.seattlerobotics.org/guide/servos.html, http://www.baldor.com/pdf/manuals/1205-394.pdf, and Parallax educational materials at http://learn.parallax.com/
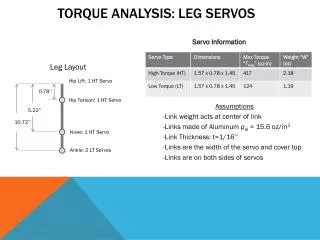
Overview • Servo motorsare used for angular positioning. They typically have a movement range of 180 deg but can go up to 210 deg. • The output shaft of a servo does not rotate freely. It seeks a particular angular position under electronic control. • Servos are typically rated by torque and speed. A servo rated 40 ounce-in/.21 means that at 1 inch from the hub, the servo can exert 40 ounces of force and move 60 deg in 0.21 sec.
What makes a Servo • Servo motors and are constructed out of basic DC motors, by adding: • some gear reduction • a position sensor for the motor shaft • an electronic circuit that controls the motor's operation • The basic hobby servo has a 180:1 gear ratio. The motor is typically small. • Typically, a potentiometer (variable resistor) measures the position of the output shaft at all times. • An informative link
Feed-back loop open-loop closed-loop
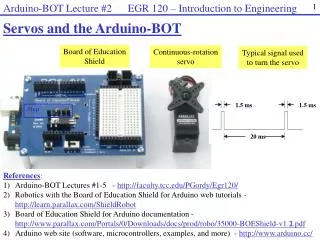
Control • An external controller (such as the Arduino) tells the servo where to move by encoding information in the duration or width of a high pulse, referred to as pulse width modulation, PWM). • PWM uses 1 to 2ms out of a 20ms time period to encode information.
PWM • A control wire communicates the angular movement. The angle is determined by the duration of the pulse on the control wire. • The servo expects a pulse every 20 millisec (.02 seconds). The length of the pulse determines how far the motor turns. • For a 1.5 millisecond pulse, the motor turns to the 90 degree position (i.e., the neutral position). • If the pulse is shorter than 1.5 ms, the motor turns the shaft to closer to 0 degrees. If the pulse is longer than 1.5ms, the shaft turns closer to 180 degrees.
PWM • Each pulse is from 1300 to 1700 microsec (μs) in duration • The pulses repeat about 50 times each second---once every 20 millisec
PWM • The amount of power applied to the motor is proportional to the distance to be traveled. • If the shaft needs to turn a large distance, the motor runs at full speed. • If it needs to turn a small amount, the motor runs at a slower speed.
Modified Servos • Servo motors can also be retrofitted to provide continuous rotation: • Remove mechanical limit (revert back to DC motor shaft). • Remove pot position sensor (no need to know position) and replace it with 2 equal-valued resistors with a combined resistance equivalent to that of the pot. Makes the servo “think” it is in the 90 deg position. Not always necessary
Modified Servos • The idea is to make the servo think that the output shaft is always at the 90 degree mark. • This is done by removing the feedback sensor, and replacing it with an equivalent circuit that creates the same readings as the sensor at 90 degrees. • Then, the control signal for 0 degrees causes the motor to turn full speed in one direction. The signal for 180 degrees causes the motor to turn full speed the other direction. • Since the feedback from the output shaft is disconnected, the servo continues in the specified direction as long as the signal remains.
Parallax Servos • The parallax servos are modified servos with an adjustable potentiometer. • The potentiometer (a.k.a., pot) should be adjusted to make the servo think that it is at the 90 degree mark.
Parallax Servo Connections Servo Connector: Black – ground Red – power White – signal
Calibration Program #include <Servo.h> Servo myServo; void setup() { myServo.attach(9); myServo.writeMicroseconds(1500); // Stop } void loop() { }
Demonstration Program #include <Servo.h> Servo myServo; // Create Servo object void setup() { myServo.attach(9); // Servo is connected to digital pin 9 } void loop() { myServo.writeMicroseconds(1700); // Counter clockwise delay(2000); // Wait 2 seconds myServo.writeMicroseconds(1300); // Clockwise delay(2000); myServo.writeMicroseconds(1500); // Stop delay(2000); }