Download
1 / 14
140 likes | 317 Views
Torque Analysis: Leg Servos. Servo Information. Leg Layout. Hip Lift: 1 HT Servo. 0.78’’. Hip Torsion: 1 HT Servo. Assumptions Link weight acts at center of link Links made of Aluminum ρ al = 15.6 oz /in 3 Link Thickness: t=1/16’’ Links are the width of the servo and cover top

E N D
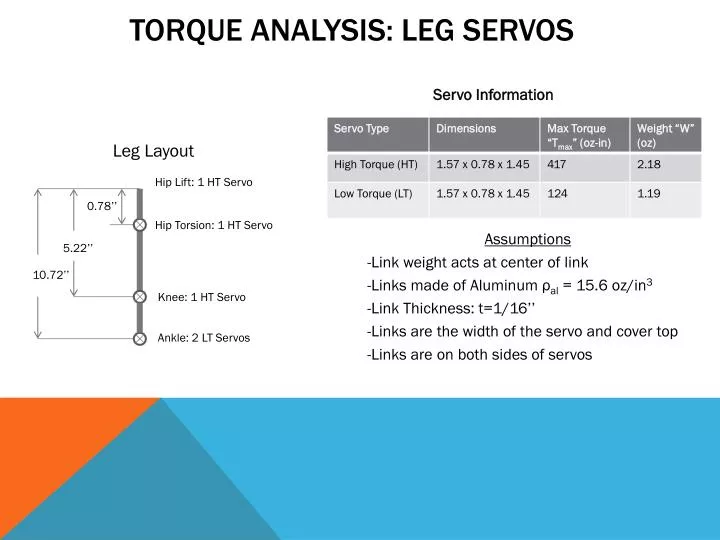
Torque Analysis: Leg Servos Servo Information Leg Layout Hip Lift: 1 HT Servo 0.78’’ Hip Torsion: 1 HT Servo Assumptions Link weight acts at center of link Links made of Aluminum ρal = 15.6 oz/in3 Link Thickness: t=1/16’’ Links are the width of the servo and cover top Links are on both sides of servos 5.22’’ 10.72’’ Knee: 1 HT Servo Ankle: 2 LT Servos
Torque Analysis: Hip Servo Max Torque Condition on Hip Servo when leg fully extended and // to ground L3 F1= ρal*t1(2*L2*W1+(L2-1.25)*W2) F1=15.6*0.0625(2*5.22*0.78+(5.22-1.25)*1.45 F1=13.90 oz L2 L1=0.78’’ L2=5.22’’ L3=10.72’’ L1 F2= ρal*t1(2*(L3-L2) *W1+(L3-L2-1.25)*W2) F2=15.6*0.0625(2*(10.72-5.22)*0.78 +(10.72-5.22-1.25)*1.45 F2=14.37 oz F1 F2 Tmax + S1=S2=S3=SHT = 2.18 oz S4=2SLT= 3.88 oz S2 S1 S4 S3
Torque Analysis: Knee Servo Max Torque Condition on Knee Servo when Thigh // to ground & Shin ┴ to ground Additional Assumptions Each Arm consists of 1LT & 3 HT Servos Neck has 2 LT Servos Hip Joint has 3 HT Servos Arm Links are same as leg links (conservative) Torso + Electronics weigh 4 lbs (64oz) Each Knee has to lift ½ weight of robot -Upper body leaning such that half weight is at thigh and other half is halfway b/t thigh and knee F1 L2 L2=5.22’’ L3-L2=5.5’’ F1=6.76 oz + Tmax L3-L2 Wr= 2Warm+Wneck+2Whip+Wtorso Wr=2*(1LT+3HT+F1)+2LT+3HT+48 Wr=2(1.94+3*2.18+13.9)+(2*1.94)+2(3*2.18)+64) Wr= 128.54oz 1.61
Torque Analysis: PUSH UP Push-up Layout Servo Information 140mm 140mm 120mm 120mm F Assumptions Link weight acts at center of link Links made of Aluminum ρal = 15.6 oz/in3 Link Thickness: t=1/16’’ Links are the width of the servo and cover top Mass of 2 lbs at chest used to estimate internal electronic components and hip mass of 1 lb used to estimate battery 118mm 118mm 201mm F 182mm 120mm + O
Torque Analysis: PUSH UP Max Torque Condition on Hip Servo when leg fully extended and // to ground L4 F1= ρal*t1(2*L2*W1+(L2-1.25)*W2) F1=15.6*0.0625(2*5.22*0.78+(5.22-1.25)*1.45 F1=13.90 oz L3 L2 F2= ρal*t1(2*(L3-L2) *W1+(L3-L2-1.25)*W2) F2=15.6*0.0625(2*(10.72-5.22)*0.78 +(10.72-5.22-1.25)*1.45 F2=14.37 oz L1 L1=182mm L2= 383mm L3=501mm L4=620mm F2 F1 M=2lbs S1= 2*2.18 oz= 4.36 oz S2= 6*2.18 oz = 13.08 oz S3= 4*2.18 oz = 8.72 oz To + F S3 S1 M S2 +(*) – (F * ) , assume T=0 at o (moment balance) F+(8.72*620))/620 T