Download
1 / 1
20 likes | 186 Views
Limiting-case Analysis of Continuum Trunk Kinematics. Bryan A. Jones Electrical and Computer Engineering Dept., Mississippi State Univ., USA Ian D. Walker Electrical and Computer Engineering Dept., Clemson University, USA.

E N D
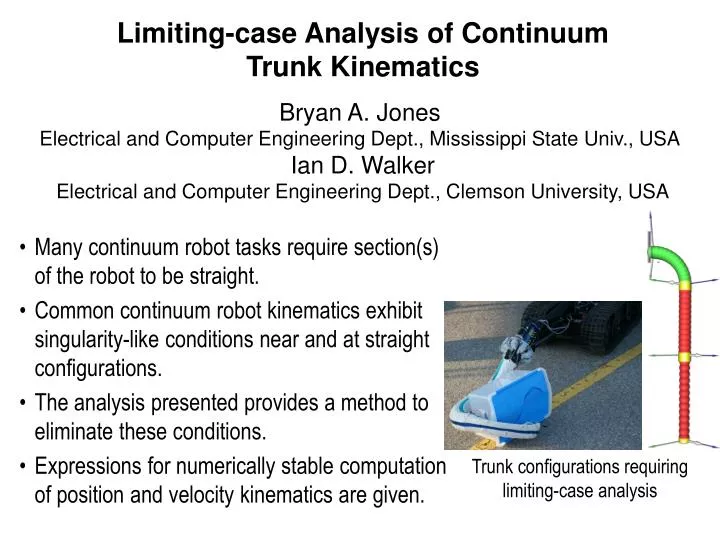
Limiting-case Analysis of Continuum Trunk Kinematics Bryan A. Jones Electrical and Computer Engineering Dept., Mississippi State Univ., USAIan D. Walker Electrical and Computer Engineering Dept., Clemson University, USA • Many continuum robot tasks require section(s) of the robot to be straight. • Common continuum robot kinematics exhibit singularity-like conditions near and at straight configurations. • The analysis presented provides a method to eliminate these conditions. • Expressions for numerically stable computation of position and velocity kinematics are given. Trunk configurations requiring limiting-case analysis