Download
1 / 9
90 likes | 242 Views
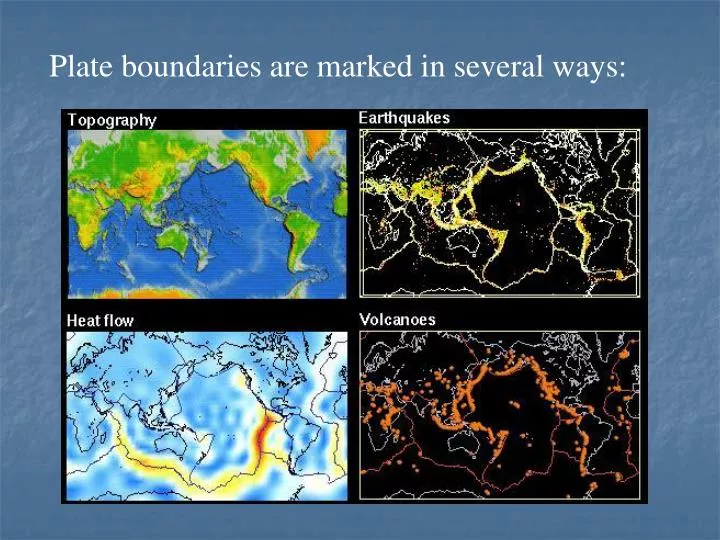
Plate boundaries are marked in several ways: . Names of the plates: . (Lowrie, 1997) Arrows indicate relative velocities (mm/yr) from NUVEL-1 model of DeMets et al., 1990. Types of plate boundaries: . Assumptions of Plate Tectonics.

E N D
Names of the plates: (Lowrie, 1997) Arrows indicate relative velocities (mm/yr) from NUVEL-1 model of DeMets et al., 1990
Assumptions of Plate Tectonics • The generation of new plate material occurs by seafloor spreading; that is, new oceanic lithosphere is generated along the active mid-ocean ridges. • The new oceanic lithosphere, once created, forms part of a rigid plate; this plate may or may not include continental material. • The Earth’s sruface are remains constant; therefore, seafloor spreading must be balanced by consumption of plate elsewhere. • The lithospheric plates are capable of transmitting stresses over great horizontal distances without buckling; in other words, the relative motion between plates is taken up only along plate boundaries.
Plate motions can be determined in several ways. The traditional way is using marine magnetic anomalies:
Magnetic anomalies allow the identification of isochrons in the worlds oceans.
Very Long Baseline Interferometry (VLBI) VLBI measures the time difference between the arrival at the Earth of a radio signals emitted by quasars. The time difference between arrivals at two satellites is proportional to the distance between the two satellites and the direction of the source. These satellites may be separated by some 10,000 km. Using large numbers of time difference measurements from many quasars observed with a global network of antennas, VLBI determines the inertial reference frame defined by the quasars and simultaneously the precise positions of the antennas. Because the time difference measurements are precise to a few picoseconds, VLBI determines the relative positions of the antennas to a few millimeters and the quasar positions to fractions of a milliarcsecond. Since the antennas are fixed to the Earth, their locations track the instantaneous orientation of the Earth in the inertial reference frame.
Satellite and Lunar Laser ranging (SLR & LLR) SLR targets are satellites equipped with corner cubes or retro-reflectors. Currently, the global SLR network tracks over forty such satellites. The observable is the round-trip pulse time-of-flight to the satellite. SLR systems are equipped with short-pulse laser transmitters that can range to orbiting satellites. Lunar Laser Ranging (LLR) systems can range to retro-reflectors located on the moon.
Global positioning system (GPS) There are 24 GPS satellites currently in circular orbits some 20,200 kilometers above the Earth. At any one time in most places six can be "seen" by GPS receivers that get and process signals. GPS receivers calculate current position (latitude, longitude, altitude) with varying degrees of precision. There are over 200 permanent GPS receivers located world wide. These provide data for modeling plate motions on yearly time scales.