Download
1 / 29
290 likes | 542 Views
Reservoir Modeling with EnKF: A sensitivity study. L. Heidari (IFP), V. Gervais (IFP), M. Le Ravalec (IFP), H. Wackernagel (ENSMP) Ecole Des Mines de Paris (ENSMP) Institut Français du Pétrole (IFP). 4 th Ensemble Kalman Filter Workshop, 22-24 June 2009 - Bergen , Norway. Overview.

E N D
Reservoir Modeling with EnKF: A sensitivity study L. Heidari (IFP), V. Gervais (IFP), M. Le Ravalec (IFP), H. Wackernagel (ENSMP) Ecole Des Mines de Paris (ENSMP) Institut Français du Pétrole (IFP) 4th Ensemble Kalman Filter Workshop, 22-24 June 2009 - Bergen , Norway
Overview • Background • Reservoir Study and History Matching • Kalman Filters • Ensemble Kalman Filter – EnKF • Application • 2D synthetic case study • Sensitivity Tests • Conclusions & perspectives
Overview Background Reservoir Study and History Matching Kalman Filters Ensemble Kalman Filter – EnKF Application 2D synthetic case study Sensitivity Tests Conclusions & perspectives 3
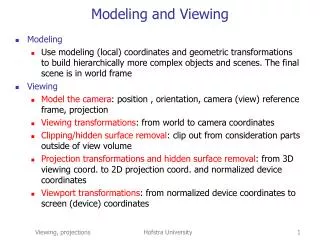
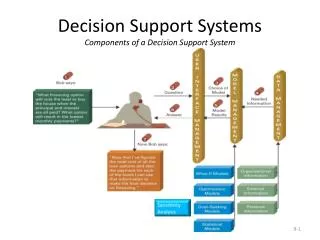
Fluid Flow Simulation Upscaling (Phi, K) Reservoir model Geological model (facies, porosity, permeability) Observed Production data Simulated production data Reservoir Study ? = • Aim • Constrain reservoir models to production history by adjusting parameters: porosity, permeability, etc.
Sequential Methods Time t0 t1 t2 Measurements Measurements Assimilation method Assimilation method Initial state Corrected state (t1) Corrected state (t2) … Kalman Filter Forecasted state (t2) Forecasted state (t1) Dynamical model Dynamical model t0 t2 t1 Time
Overview Background Reservoir Study and History Matching Kalman Filters Ensemble Kalman Filter – EnKF Application 2D synthetic case study Sensitivity Tests Conclusions & perspectives 6
Dynamic Model Operator TrueState Measurement error Measurement Operator Kalman filter • Assumptions • Linear dynamic model • Gaussian probability distribution function • First Order Markov processes • Independent and uncorrelated model and measurement errors • Kalman Filter estimate is based on • Forecast Estimate • Measurements
Distance between and f Distance between and d Kalman gain Simulated data Kalman filter analysis • Kalman filter estimate, a , minimizes • Kalman filter estimate, a :
Kalman filter forecast • System Dynamics • Linear • Non linear • Slightly Non Linear Models • Extended Kalman Filter • Taylor expansion of nonlinear model operator F • Highly Non Linear Models • Ensemble Kalman Filter • Ensemble representation of error covariance matrix Model operator
Overview Background Reservoir Study and History Matching Kalman Filters Ensemble Kalman Filter – EnKF Application 2D synthetic case study Sensitivity Tests Conclusions & perspectives 10
Best-guess Ensemble Kalman filters (EnKF) • Ensemble representation of error covariances for • Model State • Measurements • Forecast • The time evolution of uncertainty is obtained by integrating each model state forward in time • Analysis • Kalman linear analysis scheme applied to each model state with the sample covariance
Advantages of EnKF for History Matching Only one fluid-flow simulation over the whole production history per model of the ensemble Real-time assimilation of data, for any data frequency Uncertainty quantification Practical implementation Can be plugged with any fluid-flow simulator Suitable for parallel computation Relatively low computational cost 12
Overview Background Reservoir Study and History Matching Kalman Filters Ensemble Kalman Filter – EnKF Application 2D synthetic case study Sensitivity Tests Conclusions & perspectives 13
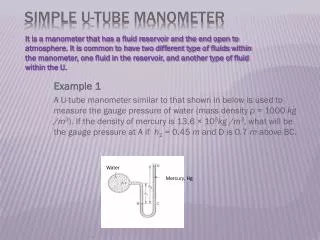
Application : 2D synthetic case P P I P P • Reservoir • Size : 500 × 500 × 1 m • Grid : 50× 50 × 1 • PetrophysicalProperties • porosity = cte , Kv/Kh = cte • Reference ln(Kh): spherical variogram • FluidFlow • oil-water, IFP simulator: PumaFlow • Water Injection • Well plan • 5 wells: 4 producers and 1 injector • Production data • Bottom hole Pressure • (BHP) • Surface Oil Rate • (QOS) • Watercut • (WCT) 14
Reference data P2 P3 Inj P1 P4 Ref ln(Kh) 15
Assimilation with EnKF Static parameter Log of permeability One value per grid block Pressure Dynamical state Water saturation Surface oil rate One value per well Bottom hole pressure Simulated measurements Water cut • Ensemble of 50 models • State-parameter vector • 17 assimilations, Once every month 16
Evolution of ln(Kh) mean and variance ln(Kh) reference model Mean Initial Model 1st assimilation 4th assimilation 10th assimilation 17th assimilation Variance 17
Simulated answer and prediction – Prod3 Ensemble members Ensemble mean Reference Initial ensemble Prediction Final ensemble 18
Root Mean Square Error - RMS Reference value at each grid Ensemble Mean value for each grid Total number of grids Simulated data for ensemble member Number of data per time step Number of time steps Reference model Measurements 19
Overview Background Reservoir Study and History Matching Kalman Filters Ensemble Kalman Filter – EnKF Application 2D synthetic case study Sensitivity Tests Conclusions & perspectives 20
Effect of Initial Ensemble True Oil Cumulative Oil Production • 10 Ensembles of size 50 • Prediction of cumulative oil production after 5.5 years 21
Effect of Assimilation Time Interval 2 Months Long Assimilation Interval Base Case Short Assimilation Interval Time 22
Effect of Ensemble Size - 1 Initial Mean Final Ensemble Size Reference ln(Kh) Initial Variance Final 50 100 200 500 23
Effect of Ensemble Size - 2 Prediction Ensemble members Ensemble mean Reference 50Members 100Members 200Members 500Members BHP QOS WCT 24
Measurement Uncertainty Mean Initial Model High Case : 10% Low case : 1% Base Case : 5% Variance 25
Overview Background Reservoir Study and History Matching Kalman Filters Ensemble Kalman Filter Theory Implementation Application 2D synthetic case study Sensitivity Tests Conclusions & perspectives 26
Main challenges Finite number of models used to represent uncertainty Quality of initial sampling Variability Preservation Linear analysis for a non linear model Physical inconsistency between parameters and state after analysis Non Gaussian distributions Multimodal distributions are not well preserved (e.g. channel and barrier permeability distribution, facies distributions) Large amount of data 4D seismic 27
Conclusions and perspectives EnKF application to a 2D model and Sensitivity studies Several ensembles of the same size for a sound uncertainty quantification Smaller assimilation time interval : Better Match Lower Variance Larger ensemble size : Better match for production data Variance preservation Larger simulation and computational cost Larger Measurement Uncertainty Variance Preservation Less efficient for matching production data Perspectives Facies History Matching Real field case study 28
Thank you for your attention ! Any Questions ?

![Data Modeling [Comparison of data modeling techniques ]](https://cdn0.slideserve.com/205866/data-modeling-comparison-of-data-modeling-techniques-dt.jpg)