Download
1 / 9
100 likes | 214 Views
WILL BAKER. Kalman Sense. Digital Processing of Gyroscope & Accelerometer Measurements. Inertial Measurement Devices. Micro-Electro-Mechanical S ystems (MEMS) 3-axis Accelerometer Measures Inertial Force Vectors X,Y,Z Trigonometric Relations Orientation 3-axis Gyroscope

E N D
WILL BAKER Kalman Sense Digital Processing of Gyroscope & Accelerometer Measurements
Inertial Measurement Devices • Micro-Electro-Mechanical Systems (MEMS) • 3-axis Accelerometer • Measures Inertial Force Vectors • X,Y,Z Trigonometric Relations Orientation • 3-axis Gyroscope • Measures rotation about an axis • Rate of change in degrees/sec • Integrated over time to relative angles • 3-axis Magnometer • Measures magnetic fields (Compass)
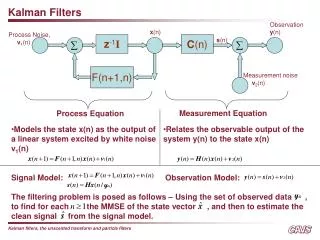
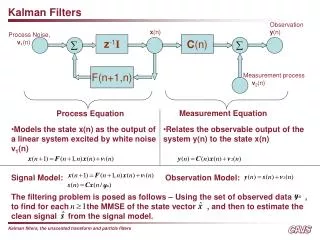
Orientation • Align axis of each device to maintain a uniform coordinate system
Problems? • Accelerometer has JITTER • Random noise introduced to the system • Gyroscope has DRIFT • Does not return to zero rate when rotation stops • Tends to linearly increase (ramp up)
Solutions? • Low Pass Filter • Filter out short-duration accelerations • Only long-term acceleration passes • Introduces lag due to averaging • Complementary Filter • Use Low-Pass filter on accelerometer • Numeric integration and High-Pass filter on gyroscope • Kalman Filter • Predict state and accurately estimate orientation • Based on known physical properties of the system
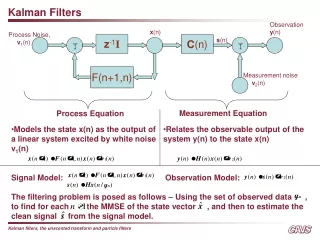
Kalman Filtering • PREDICTION • Predict state estimate: • Gyro(k) – Accel(k-1) – bias • Predict Estimate Covariance • Noise from Gyro & Accel are independent • Less trust in accelerometer
Kalman Continued • UPDATE • Y=Accel(k) • YINNOVATION = Accel(k) – estimate(k-1) Covariance JitterAcellerometer ≈ .3 rad • Calculate Kalman Gain • Inversely proportional to covariance • Correct Prediction State X=X+KYINNOVATION • Calculate covariance of prediction error
Expansion • KalmanFilter used to de-noise the system • More Sensors = More Fun • Magnometer used for Yaw correction • Accelerometer Z-reference is always down (Gravity) • Difficult to account for YAW • GPS used for centrifugal acceleration adjustment • More information available means more feedback to account for errors and misallignment • Directional Cosine Matrix (DCM) • Describe absolute orientation based on two coordinate systems relative to one another (reference frame) • Rotational Matricies are used to related the two coordinate systems and plot how the object has rotated in the X,Y,Z planes
Conclusions + Demonstration • Vast amount of sensors in micro electronics allow for the collection and manipulation of data to determine ‘real’ orientation • These algorithms are often used in navigation and flight control • The Kalman Filter uses a unique prediction method and error tracking to produce a stable output