Download
1 / 18
180 likes | 343 Views
Programmieren 2 Future Car Projekt Praktikum 6 - Graphen. Speichern von Graphen - Traversieren von Graphen Kürzeste Wege. Reiner Nitsch reiner.nitsch@h-da.de. 1. 2. 4. . Adjazenzlisten. Array von Adjazenzlisten. 2. 5. 4. 1. . Die mit Knoten 5 direkt

E N D
Programmieren 2Future Car ProjektPraktikum 6 - Graphen • Speichern von Graphen- Traversieren von Graphen • Kürzeste Wege Reiner Nitsch reiner.nitsch@h-da.de
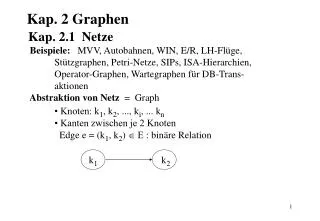
1 2 4 Adjazenzlisten Array vonAdjazenzlisten 2 5 4 1 Die mit Knoten 5 direkt verbundenen Nachbarknoten (= Kantenmenge E5 ) 3 5 6 1 2 3 4 1 2 5 4 5 6 5 4 3 2 Ungerichteter Graph G(V,E) V: Knotenmenge E: Kantenmenge 6 3 6 1 2 4 2 5 1 2 3 3 5 6 4 5 6 4 2 Gerichteter Graph 5 4 6 6 Darstellung von Graphen als Array von Listen • Grundlagen zu Graphen (siehe Vorlesung Mathematik 1) • Adjazenzlisten erlauben Antwort auf Fragen zu Graphen G wie z.B. • Wieviele Kanten enden an vi? • Welche Nachbarn vj hat vi? • Existiert Kante E=(vi,vj)? O(|Ei|) • Gewichteter Graph: Gewicht als zu-sätzliche Info der Listenelemente • Speicherbedarf? proportional zur Anzahl Knoten plus Anzahl Kanten O(|V|+|E|) Projekt FutureCar
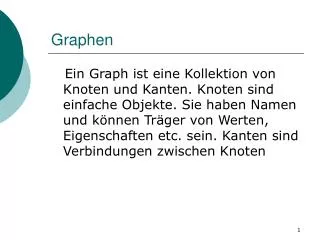
j Adjazenzmatrix a mit Elementen aij aij = 1 wenn Kante E=(vi,vj) in G enthalten, sonst aij=0 1 2 3 4 5 6 0 1 0 1 0 0 1 0 0 1 1 0 0 0 0 0 1 1 1 1 0 0 1 0 0 1 1 1 0 0 0 0 1 0 0 1 1 2 3 4 5 6 1 2 3 i 4 5 6 Ungerichteter Graph G(V,E) aij = aji (symmetrisch) 0 1 0 1 0 0 0 0 0 0 1 0 0 0 0 0 1 1 0 1 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 1 1 2 3 4 5 6 Gerichteter Graph G(V,E) aij≠ aji (unsymmetrisch) Darstellung von Graphen mit Adjazenzmatrix • Adjazenzlisten erlauben Antwort auf Fragen zu Graphen G wie z.B. • Wieviele Kanten enden an vi? • Welche Nachbarn vj hat vi? • Existiert Kante E=(vi,vj) mit Zeitkomplexität O(1) • Speicherbedarf? O(|V|2) • ungünstig wenn G wenige • Kanten hat • Gewichteter Graph: Gewicht an Stelle von '1' in Matrix eintragen Projekt FutureCar
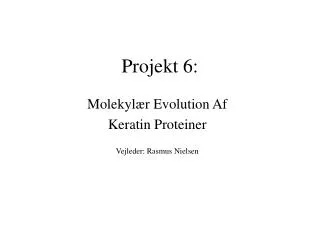
Anwendungsbeispiel - FutureCar-Projekt • Die FutureCar-Anwendung ist ein TestUnit für Autopilot-Algorithmen zur autonomen Steuerung von Fahrzeugen. • Das TestUnit besteht aus einem virtuellen Straßenlabyrinth (FCWelt, s. Abb.) in dem sich viele virtuelle Fahrzeuge (FutureCars) gesteuert durch ihren individuellen Autopiloten unfallfrei bewegen müssen. Allgemeine Vorgaben/Einschränkungen: • Die FCWelt soll auf einem zeichenorientierten Display darstellbar sein. • Dazu muss sie rechteckig und in virtuelle Parzellen (s. Abbildung) unterteilt sein. • Jede Parzelle symbolisiert ein FutureCar, ein Haus oder einen Teil der Straße. • Alle Straßen sind zweispurig und verlaufen senkrecht zueinander. Sie werden begrenzt durch Häuser. • Jedes FutureCar verfügt über einen Scanner, zum Abtasten seiner unmittelbaren Umgebung • Für Navigationsaufgaben ist das Straßennetz in Form von Adjazenzlisten darzustellen. Projekt FutureCar
x # # # # y 0,0 1,0 2,0 3,0 # 0,1 1,1 2,1 3,1 # # # 0,2 1,2 2,2 3,2 0,3 1,3 2,3 3,3 1,1 1,2 2,1 1,1 3,2 3,1 2,1 1,3 1,2 1 1; 1 2; 2 1; 1 1; 3 1; 2 1; 3 2; 1 2; 1 3; 2 2; 3 2; 3 2; 3 1; 4 2; 5 2,2 3,2 4,2 3,2 3,1 Adjazenzlisten als Textsequenz (ohneKantengewichte) Adjazenzliste des Graphen der FutureCar World Rasterkarte (Grid) von FC-City 1 4 Rasterkarte von FC-City mit XY-Koordinaten:Jede Parzelle ist ein Knoten 2 Adjazenzlisten Graph zur Modellierung der Erreichbarkeitsbeziehungen zwischen den Zellen der Rasterkarte 3 Projekt FutureCar
x # # # # y 0,0 1,0 2,0 3,0 # 0,1 1,1 2,1 3,1 # # # 0,2 1,2 2,2 3,2 0,3 1,3 2,3 3,3 Dateiformat des Graphen Rasterkarte (Grid) von FC-City // Knotenliste (1,1) (1,2) (1,3) (2,1) (2,2) (2,3) (3,1) (3,2) …,… 1 Knoten und Kanten im Dateiformat Rasterkarte von FC-City mit XY-Koordinaten:Jede Parzelle ist ein Knoten 2 // Kantenliste // <von>;<nach>;<Gewicht>; (1,1);(1,2);1 (1,2);(1,3); (1,3);(2,3);30; (2,1);(1,1);1; (2,2);(3,2);1; (2,3);(2,2);1; (2,3);(1,3);30; (3,1);(2,1);1; (3,1);(3,2);30; (3,2);(3,1);30; …,… Graph zur Modellierung der Erreichbarkeitsbeziehungen zwischen den Zellen der Rasterkarte 3 Projekt FutureCar
Node + loc + pfirst:ListElem* 2,2 2,1 3,2 + Konstruktor: 1..N 1 Graph - nodes:vector<Node> + Konstruktor + … Implementierung mit indexbasierten Arrays Problem Um z.B. auf die Adjazenzliste des Knotens K=(3,1) zuzugreifen, braucht man seinen Index. Diesen findet man in linearen Datentypen (Liste, Array) nur durch lineare Suche nach dem Schlüsselwert (3,1). Lineare Suche hat die Kosten O(N). Idee Wenn man den Index von K direkt aus seinem Schlüsselwert (3,1) berechnen könnte, wäre ein Suchverfahren mit konstanten Kosten, d.h. O(1) gefunden! Vorschläge? Location 1,1 1,1 1,2 + x,y:int 2,1 2,1 1,1 ListElem 3,1 3,1 3,2 2,1 + loc:Location + pnext:ListElem* 1,2 1,2 1,3 2,2 2,2 2,2 3,2 2,1 3,2 3,2 4,2 3,1 Adjazenzlisten Projekt FutureCar
Node + loc:Location + adjList + visited:bool Markierung + Konstruktor: Traversieren von Graphen • Als Traversieren bezeichnet man das systematische Besuchen aller Knoten und das Durchlaufen jeder Kante eines Graphen. • Algorithmen zum Traversieren eines Graphen dienen als Basis für viele andere grundlegende Algorithmen zur Verarbeitung von Graphen • Man unterscheidet zwischen • Breitentraversierung (breadth-first search, BFS): Die Knoten werden, geordnet nach der "Entfernung" von einem Startknoten, durchlaufen • zuerst alle Knoten mit 1 Kantenlänge Abstand vom Startknoten • danach alle diejenigen Knoten mit Abstand 2, • danach die mit Abstand 3, usw. • Tiefentraversierung (depth-first search, DFS): Dieser Algorithmus erhöht immer zuerst die Distanz vom Startknoten, bevor er in die Breite geht und Nachbarknoten mit gleicher Distanz besucht (meist rekursiv implementiert) • Bereits besuchte Knoten müssen markiert werden, weil sich die Algorithmen sonst in den Kreisen des Graphen verlieren. Projekt FutureCar
Node - loc:Location - adjList - visited:bool + Konstruktor: Tiefentraversierung (Rekursiv) • Rekursiver Algorithmus (in Pseudocode), der ausgehend von einem unmarkierten Knoten vi, alle anderen Knoten vj, j!=i eines Graphen G besucht Funktion: traverse-dfs(v) Zweck: Tiefensuche in einem Graphen Parameter v: Knoten bei dem die Suche beginnt PRE: --- POST: Alle Knoten, die von v erreichbar sind, sind gefunden. Markiere v als besucht Bestimme einen Nachbarknoten von v und nenne diesen vnext WHILE(vnext existiert UND noch nicht besucht ist) beginne weitere Tiefensuche bei vnext Wieder zurück, bestimme weiteren Nachbarknoten von v und nenne diesen wieder vnext END WHILE procedure traverse-dfs(v) visited(v) := true vnext := adjList[v] WHILE exist(vnext) AND NOT visited(vnext) traverse-dfs(vnext) vnext := succ(vnext) END WHILE Pseudocode (verbal) Pseudocode (mnemonisch) Projekt FutureCar
1 2 4 1 1 1 1 1 1 1 1 1 1 2 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 3 2 5 4 1 3 5 6 4 4 4 4 4 4 4 4 4 4 5 5 5 5 5 5 5 5 5 5 6 6 6 6 6 6 6 6 6 6 4 1 2 5 5 4 3 2 6 3 6 Beispiel zur (rekursiven) Tiefentraversierung procedure traverse-dfs(v) visited(v) := true vnext := adjList[v] WHILE exist(vnext) AND NOT visited(vnext) traverse-dfs(vnext) vnext := succ(vnext) END WHILE 1 2 4 Adjazenzlisten von Seite 2 2 5 4 1 3 5 6 4 1 2 5 5 4 3 2 6 3 6 Startknoten Komplexität: O(|V|+|E|) Alle Knoten und Kanten besucht! Projekt FutureCar
… und hier schon wieder runter! Tiefentraversierung (Iterativ) • Iterativer Algorithmus mit einem Stack, der ausgehend von einer unmarkierten Ecke vi, alle anderen Knoten vj, j!=i eines Graphen G besucht PRE: --- POST: Alle Ecken, die von v erreichbar sind, sind markiert. procedure traverse-dfs(v) s := empty-stack // s ist ein lokaler Stack visited(v) := true // markiere v als besucht push(s,v) // lege v auf den Stack s WHILE NOT empty(s) DO { v := top(s) // hole oberstes Element aus Stack s vnext := adjList[v] // hole ersten Nachbarknoten WHILE exist(vnext) AND visited(vnext) DO // schon besucht? vnext := succ(vnext) // Ja! Dann eben den Nächsten END WHILE IF( exist(vnext) ) ) THEN // Noch einen Unbesuchten gefunden? visit(vnext) // diesen besuchen (und bearbeiten), visited(vnext) := true // als "besucht" markieren und push(s,vnext) // Erst mal auf den Stack damit ... ELSE DO pop(s) END IF END WHILE // Erledigt! Alle Nachbarn von v besucht } Projekt FutureCar
Breitentraversierung • Iterativer Algorithmus, der alle Knoten eines zusammenhängenden Graphen geordnet nach der Entfernung vom Startknoten s durchläuft. • Zuerst werden alle vom Startknoten s über 1 Kante erreichbaren Knoten besucht • Danach alle über mindestens 2 Kanten erreichbaren Knoten, usw. • Entsteht formal aus Tiefentraversierung, wenn man den Stack durch eine Queue ersetzt. PRE: --- Post: Alle Knoten, die von s erreichbar sind, sind markiert, also besucht worden procedure bfs_node(s) q := empty-queue // Definition einer leeren lokalen Queue q visited(s) := true // Startknoten s als "besucht" markieren enqueue(q,s) WHILE NOT empty(q) DO v := front(q) // vordersten Knoten in q lesen vnext := adjList[v] // hole ersten Nachbarknoten WHILE exist(vnext) AND visited(vnext) DO // schon besucht? vnext := succ(vnext) // Ja! Dann eben den Nächsten END WHILE IF exist(vnext) THEN // Noch einen Unbesuchten gefunden? visit(vnext) // diesen besuchen (und bearbeiten), visited(vnext) := true // als "besucht" markieren und enqueue(q,vnext) // erst mal in queue einreihen, wo sie bis zur // Bearbeitungihrer Nachbarknoten warten ELSE DO dequeue(q) // Erledigt! Alle Nachbarn von v mit gleichem END IF // Abstand vom Startknoten wurden besucht. END WHLE Projekt FutureCar
1 2 4 1 1 1 1 1 1 1 1 1 2 2 2 2 2 2 2 2 2 3 3 3 3 3 3 3 3 3 2 5 4 1 4 4 4 4 4 4 4 4 4 5 5 5 5 5 5 5 5 5 6 6 6 6 6 6 6 6 6 3 5 6 4 1 2 5 5 4 3 2 Queue 6 3 6 t: Startknoten 1 3 5 4 6 Beispiel zur Breitentraversierung procedure bfs_node(s) q := empty-queue visited(s) := true enqueue(q,s) WHILE NOT empty(q) DO v := front(q) vnext := adj[v] WHILE exist(vnext) AND visited(vnext) DO vnext := succ(vnext) END WHILE IF exist(vnext) THEN visit(vnext) visited(vnext) := true enqueue(q,vnext) ELSE dequeue(q) END IF END WHILE 1 2 4 Adjazenzlisten von Seite 2 2 5 4 1 3 5 6 4 1 2 5 5 4 3 2 6 3 6 2 5 4 1 3 6 2 Jetzt sind alle Knoten mit Distanz "1Kante" zum Startknoten besucht Alle Knoten und Kanten besucht! Projekt FutureCar
Kürzeste Wege mittels Breitensuche • Gesucht ist eine Verbindung (Pfad) zwischen 2 Knoten: • Tiefensuche liefert eine entsprechende Kantenfolge, wenn es eine gibt (aber nicht unbedingt die Kürzeste). • Breitensuche liefert garantiert die Kürzeste. • Aufgabe Mit Hilfe eines Breitensuchverfahrens soll der kürzeste Weg in einem ungewichteten Graphen G vom Startpunkt s zum Zielknoten d gefunden werden, der über die geringste Anzahl von Kanten verläuft. Dabei wird der Weg so codiert, dass man ihn hinterher rekonstruieren kann. • Lösung • Die Breitentraversierung durchläuft alle Knoten geordnet nach der Kantendistanz zu s. • Der Vorgängerknoten, von dem ausgehend der Knoten v betreten wird, verbindet somit v auf dem kürzesten Wege mit s (keine Kantengewichte!). • Im Bearbeitungsschritt merkt sich Knoten v daher seinen Vorgängerknoten • Nachdem Knoten d betreten wurde und dieser sich seinen Vorgängerknoten gemerkt hat, ist die Suche beendet. • Der kürzeste Weg, der d mit s verbindet, ergibt sich nun, indem man, beginnend bei d, die Folge der Vorgängerknoten rekonstruiert. • Rückwärts gelesen (std::reverse) ergibt diese Folge den gesuchten kürzesten Weg. Projekt FutureCar
Node - loc:Location - adjList - pred - visited:bool Verweis auf Vorgängerknoten + Konstruktor: Breitensuche des Knotens d ausgehend vom Startknoten s 21.12.12 PRE: exist(s), exist(d) POST: Alle Knoten, die von v erreichbar sind, sind markiert, also besucht worden FUNCTION bf_search(s,d) t := empty-queue // Definition einer leeren lokalen Queue visited(s) := true // Starknoten v als "besucht" markieren pred(s) := nil // s kennt seinen Vorgänger noch nicht enqueue(t,s) WHILE NOT empty(t) AND front(t)!=d DO // Abbruch der Suche wenn d besucht v := front(t) // vordersten Knoten in t lesen vnext := adj[v] // hole ersten Nachbarknoten WHILE exist(vnext) AND visited(vnext) DO vnext := succ(vnext) // Bereits besuchte Knoten überspringen END WHILE IF vnext != nil THEN // Solange unbesuchte Nachbarknoten zu v existieren visit(vnext) // diese besuchen (und bearbeiten), pred(v_next) := v// Vorgänger merken (besuchen & bearbeiten) visited(vnext) := true // als solche markieren und enqueue(t,vnext) // in queue einfügen, wo sie bis zur Bearbeitung // ihrer Nachbarknoten warten ELSE DO dequeue(t) // entferne vorderstes Element aus t END IF // Alle Nachbarn dieses Knotens sind besucht IF empty(t) THEN { kein Pfad von s nach d } Ergänzungen zum vorherigen Algorithmus sind ROT markiert Projekt FutureCar
Wegesuche in gewichtetem Graphen Aufgaben • Von einem Knoten s aus die kürzesten Pfade zu allen anderen Knoten des Graphen finden: Lösung mit single-source shortest path (SSSP) Algorithmen • Für alle Paare von Knoten die kürzesten Pfade finden: Lösung mit all-pair shortest path (APSP) Algorithmen • Kürzeste Wege • im ungewichteten Graph: Pfad mit geringster Kantenzahl • im gewichteten Graph: Pfad mit geringstem Gesamtgewicht • Kürzeste Wege sind nicht eindeutig • wenn 2 Wege das gleiche Gesamtgewicht haben • Kürzeste Wege existieren dann nicht • wenn gar kein Weg zwischen 2 Knoten existiert • falls der Graph Zyklen mit negativem Gesamtgewicht hat (jeder Durchlauf verringert das Gewicht des Pfades. • Wichtige Algorithmen: • Dijkstra-Algorithmus (SSSP): für Graphen mit Kantengewichten 0 • Belman-Ford-Algorithmus: Für Graphen mit negativen Gewichten aber ohne negative Zyklen (= Zyklen mit Kantensumme< 0). Projekt FutureCar
Dijkstra Algorithmus • Liefert für alle Knoten eines Graphen G die kürzesten Pfade zu einem Startknoten s • Wirkungsweise • Zusätzlich zu seiner Adjazenzliste erhält jeder Knoten v die Angabe • zur minimalen Distanz d2s[v] von v zum Startnoten s • des Vorgängerknotens pred[v] auf dem kürzesten Weg zum Startknoten • Einfügen aller Knoten in eine Priorityqueue PQ • Mit jedem Durchlauf wird der Knoten mit der bis dahin geringsten Distanz zu s aus einer PriorityQueue PQ entnommen (vmin ) und abschließend wie folgt bearbeitet: • die Distanz dneu der über vmin zu all seinen Nachbarknoten führenden Wege wird ermit-telt wobei w(vmin,vnext) das Gewicht der Kante vmin->vnext ist. • falls die bisher für vnext notierte Distanzgrößer als dneu ist, wird diese aktualisiert und vmin als neuer Vorgängerknoten eingetragen algorithm dijkstra(G,s) Eingabe: Graph G, Startknoten s FOR EACH Knoten v aus V(G) DO d2s[v]= pred[v]=nil OD d2s[s]=0 // Startknoten erhält höchste Priorität PQ:=V WHILE NOT empty(PQ) DO vmin = dequeueMin(PQ) // Für vmin ist der kürzeste Weg gefunden FOR EACH vnext OF vmin DO dneu:=d(vmin)+w(vmin,vnext) IF dneu<d(vnext) DO d(vnext):=dneu pred:=vmin FI OD OD Node + loc:Location + adjList + pred + d2s:float + Konstruktor: Projekt FutureCar
Dijkstra-Algorithmus - Eigenschaften • Mit jeder Iteration wird ein kürzester Pfad ermittelt und der jeweilige Zielknoten aus der Priorityqueue entfernt. • Nach |V| Iterationen sind für alle Knoten die kürzesten Pfade zum Startknoten bekannt. Projekt FutureCar