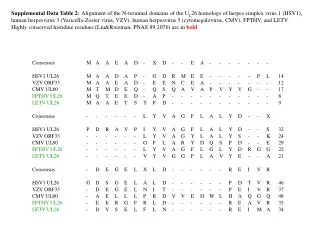
Download
1 / 73
730 likes | 892 Views
Consensus. Milan Vojnović Microsoft Research. Joint work with Moez Draief , Kyomin Jung, Bo Young Kim, Etienne Perron and Dinkar Vasudevan. Lecture series ACiD – Algorithms and Complexity in Durham, 2012. Abstract.

E N D
Consensus Milan VojnovićMicrosoft Research Joint work with MoezDraief, Kyomin Jung, Bo Young Kim, Etienne Perron and DinkarVasudevan Lecture series ACiD – Algorithms and Complexity in Durham, 2012
Abstract In this talk, I will consider the problem of distributed ranking of alternatives in a network of nodes under limited memory per node and limited information communicated between nodes. In particular, for the case of ranking of two alternatives, each node in the network is assumed to prefer one of the alternatives, and the goal for each node is to correctly identify one of the two alternatives that is preferred by majority of the nodes. This type of a problem has been studied under various names such as consensus, k-selection and quantile computation. The model is an abstraction that underlies various systems such as ranking of items in distributed peer-to-peer systems, databases and may also capture dynamics of opinion formation in social networks.
This Talk Based on • M. Draief and M. V., Convergence Speed of Binary Interval Consensus, SIAM Journal on Control and Optimization, 2012 • K. Jung, B. Y. Kim, and M. V., Distributed Ranking in Networks with Limited Memory and Communication, IEEE Int’l Symposium on Information Theory, 2012 • E. Perron, D. Vasudevan, and M. V., Using Three States for Binary Consensus on Complete Graphs, IEEE Infocom 2009
Binary Consensus Problem • Goal: each node wants to correctly decide whether 0 or 1 was initially held by majority of nodes 0 1 1 0 0 1 0 1 1
Consensus Problem (Cont’d) • Correct decision 1 1 1 1 1 1 1 1 1
Consensus Problem (Cont’d) • Incorrect decision 0 0 0 0 0 0 0 0 0
Applications • Ex. Opinion formation in social networks 0 1 0 0 0 1 0 1 1
Applications (Cont’d) • Ex. Distributed databases • Top-k query processing Query: Is object X most preferred by majority of nodes? 1 0 1 1 0
Notation 0 1 0 0 0 1 0 1 1
Notation (Cont’d) 0 1 0 0 0 1 0 1 1
Questions of Interest • Correctness: probability that each node identifies the initial majority alternative ? • Convergence time: time to reach consensus ? • Dependence on the number of nodes n and initial fraction of nodes (voting margin) holding the majority state ?
Desiderata • Reach correct consensus – initial majority • Fast convergence • Small communication overhead • Small processing per node • Decentralized
Outline • Related Work • Ternary Protocol • Quaternary Protocol • Conclusion
Classical Voter Model • Node takes over the state of the contacted node • Binary state per node & binary signaling 0 1 1 0 0 1 0 1 • 0 initially held by V nodes,1 initially held by U nodes • Complete graph node interactions • Probability of incorrect consensus
m-ary Hypothesis Testing 000110111110100011 Hi S i. i. d. mean • Q: How many states does S need to decide correct hypothesis with probability going to 1 with the number of observations ? • A: m+1necessary and sufficient (Koplowitz, IEEE Trans IT ’75)
Outline • Related Work • Ternary Protocol • Quaternary Protocol • Conclusion
Ternary Protocol • Both processing and signaling take one of three states • 0 or 1 or e • e = “indecisive” state 0 0 e 1 e 1 0 0 e e 0 1
Binary Signalling • Processing same as for ternary protocol • Binary signaling – takes one of two states 0 or 1 e e signals 0 or 1 with equal probability
Binary Signaling – A Motivation • Nodes may not be able to signal indifference – by the very nature of the application • Ex. two news pieces may be equally most read but only one can be recommended to the user US navy ship stems into port where Russian... Soldier forced to sleep in car after hotel... US navy ship stems into port where Russian...
Assumptions • Complete graph node interactions • Each node samples a node uniformly at random across all nodes at instances of a Poisson process with intensity 1
Summary of Results • Ternary protocol • Prob of error decaysexponentially with the number of nodes n– found exact exponent • log nconvergence time • Binary protocol • Prob of error worse than for ternary protocol for a factor exponentially increasing with n, but not worse than for classical voter • Convergence time C log nwith 2 C 3
Ternary Protocol - Dynamics • U = number of nodes in state 0 • V = number of nodes in state 1 • n = total number of nodes • (U,V) Markov process:
Ternary Protocol - Probability of Error • Theorem – probability of error: • (U, V) = initial point, V > U
Proof Outline • First-step analysis: with Boundary conditions:
Proof Outline (Cont’d) • Lemma – solution of Boundary conditions: • i.e. is error probability of
Proof Outline (Cont’d) V fU,U = 1/2 (U, V) Number of paths from (U, V) to (j, j) that do not intersect the line U = V -- Ballot theorem (j, j) U
Probability of Error (Cont’d) • Corollary – For • Ob. Exponential decay for large
Convergence Time Lower Bound • Lower bound: • Example: pathreduction to classical voter model U V 1 1 1 1 0 0 0 0 . . . . . .
ConvergenceTime Lower … (cont’d) • Ternary protocol on a path corresponds to a classical voter model dynamics 1 1 1 0 0 0 0 1/2 1/2 1 1 e 0 0 0 0 1/2 1 1 0 0 0 0 0
Binary Protocol – Reminder • Processing same as for ternary protocol • Binary signaling – takes one of two states 0 or 1 e e signals 0 or 1 with equal probability
Binary Protocol – Dynamics • Markov process:
Probability of Error – Binary Signaling • Theorem – where • Corollary – for large n
Probability of Error (Cont’d) • Ob. Worse than under ternary protocol for a factor exponentially increasing with • But … • Theorem – – Not worse than classical voter model
Probability of Error – Exponentially Bounded ? • Suggested by numerical results
Binary Protocol: Many-Nodes Limit • The limit ODE: • For z = u + v and w = v – u, we have
Convergence Time • Theorem – Convergence time: = constants independent on • Slower than ternary signaling by at least factor 2 • Not slower than factor 3
Proof Basic Steps • in this set in a finite time independent of • Asserted bounds follow by ODE comparisons
Extension to Plurality Protocol • alternatives • Binary consensus as a special case: • Goal: each node to correctly identify an alternative that is initially a plurality winner
Plurality Protocol • For each alternative two states: strong and weak • At each communication instance between two nodes: • If the observer node is in strong state j and the contacted node is in a different strong state, then the observer node switches to weak state j • If the observer node is in weak state j, it switches to the state of the contacted node • bits of memory per node and communication between nodes
Plurality Protocol (cont’d) • m alternatives • 2m states: weak strong … m 2 1 s s s’ s’ s’ s’ s’ s’ s s s s s’ s’ observer
Dynamics • Markov process:
Dynamics: The Limit ODE • For every and
The ODE Dynamics (cont’d) • Exponential diminishing of non-plurality states
Convergence Time Upper Bound • Linear in the number of alternatives • Logarithmic in the voting margin
Convergence Time Lower … (cont’d) • Take, for example: