Download
1 / 1
10 likes | 135 Views
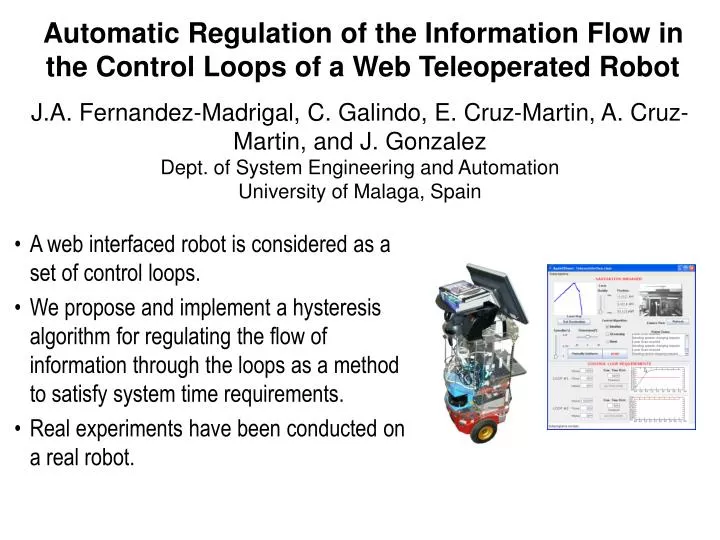
Automatic Regulation of the Information Flow in the Control Loops of a Web Teleoperated Robot. J.A. Fernandez-Madrigal, C. Galindo, E. Cruz-Martin, A. Cruz-Martin, and J. Gonzalez Dept. of System Engineering and Automation University of Malaga, Spain.

E N D
Automatic Regulation of the Information Flow in the Control Loops of a Web Teleoperated Robot J.A. Fernandez-Madrigal, C. Galindo, E. Cruz-Martin, A. Cruz-Martin, and J. Gonzalez Dept. of System Engineering and Automation University of Malaga, Spain • A web interfaced robot is considered as a set of control loops. • We propose and implement a hysteresis algorithm for regulating the flow of information through the loops as a method to satisfy system time requirements. • Real experiments have been conducted on a real robot.