Download
1 / 35
350 likes | 499 Views
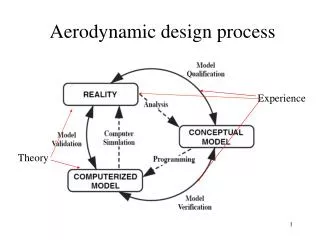
Efficient Genetic Algorithm for Aerodynamic Design of Business Jet Aircraft. B.Epstein # and S.Peigin * # Academic College of Tel-Aviv-Yaffo * Israel Aircraft Industries. Major stages of the aircraft design process. Conceptual design Preliminary design stage Final detailed design.

E N D
Efficient Genetic Algorithm for Aerodynamic Design of Business Jet Aircraft • B.Epstein#and S.Peigin* • #Academic College of Tel-Aviv-Yaffo • *Israel Aircraft Industries
Major stages of the aircraft design process • Conceptual design • Preliminary design stage • Final detailed design
Optimization to minimum drag Major drag-related objectives of the preliminary design: • To develop the minimum drag configuration in cruise conditions subject to various geometrical and aerodynamic constraints • To increase the payload • To achieve a good off-design aerodynamic performance
Why this is so difficult? • Accurate estimates of drag are difficult to attain • Global geometrical representation of aerodynamic shapes is an open problem • High-dimensional search spaces are needed • Efficient handling of non-linear constraints is required • Huge overall computational cost
Why this is so important? Breguet range equation Range Typical ratio: Wf=2/3W0 Wpayload=1/6W0 M– Mach L & D– lift and drag a– acoustic speed SFC– fuel consumption W0– landing weight Wf– fuel weight To keep the range: 1% increase in drag leads to 7.6% decrease in payload
Motivation • To increase the contribution of CFD to the overall aerodynamic design (at expense of wind tunnel and flight tests) • To reduce the preliminary design stage in the development of commercial aircrafts • To improve the quality of aerodynamic design • To reduce the overall design costs
Automatic Optimization Tool OPTIMAS: Main Features • A new strategy for handling non-linear constraints in the framework of Genetic Algorithms (GAs) • The search space is scanned by a combination of high accuracy Navier-Stokes computations with a Reduced Order Method • Multi-domain prediction-correction iterative algorithm ensures the accuracy, robustness and globality of optimal search • A multilevel parallelization efficiently makes use of computational power supplied by MPP
Single-point drag minimization problem • The objective is to minimize CD subject to the following classes of constraints: • Aerodynamic constraints: * prescribed constantCL* maximum allowedCM • Geometrical constraints: * relative thickness(t/c)i* radius of leading edge(RL)i * trailing edge angle (qT)i* beam constraints(y/t)ij • i=1,…,Nws - number of span sections • j=1,…,Nbs(i) – number of beams number of constraints Ncs – 20-25 per wing
A multi-point drag minimization problem for aerodynamic 3D wings • The objective is to minimize a weighted combination of drag values at several design points • Uniform geometrical constraints are placed upon the solution • Aerodynamic constraints are imposed separately at each of the design points which make the multipoint objective
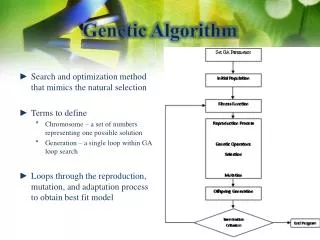
Optimization Method:Genetic Algorithms • GAs arebased on coupling deterministic and probabilistic strategies in search of optimum • They have drawn much attention in the last two decades • The basic idea behind GAs is to imitate evolution process using “genetic”operators: *selection * crossover * mutation
Floating-point GA • Tournament selection • Single-point crossover • Non-uniform distant-dependent mutation • Elitism principle
Treatment of Non-Linear Constraints by GAs: New Approach • Change of the conventional search strategy: to employ search paths through both feasible and infeasible points • The idea: the information from infeasible sub-domains can be very important and a path to the optimal point via infeasible ones can be essentially shorter
Constrained Optimization Problems Conventional approach Infeasible region Present approach Feasible region
Implementation of the constraints handling The modified objective function Q was defined as follows
ComputationalEfficiency Motivation • The major weakness of GAs lies in their poor computational efficiency • An algorithm with population M=100 requires (for the case of 200 iterations) at least 20000 evaluations of the cost function (CFD solutions) • This is practically unacceptable
ROM-LAM method • Reduced-Order Models approach in form of Local Approximation Method (ROM-LAM): • cost function is approximated by a local data base • to ensure accuracy and robustness of the method a multi-domain prediction-verification principle is used • prediction stage: GAs search on a set of domains • verification stage: the whole set of optima is verified via full Navier-Stokes computations • to ensure the global character of search - iterations
Computational efficiency:How to improve? • Fast grid generation • automatic transformation of the initial grid using topological similarity of geometrical configurations • Grid coarsening • preservation of the hierarchy of fitness function • Massive parallelization
Typical Computational Effort required for one optimization • 10 optimization steps to reach reasonable optimum • 50-150 CFD runs per optimization step • Hence approx. 500-1500 CFD runs required to achieve desired design optimum. • Intensive parallelization technology is essential to realize optimization in industrial environment.
Multilevel Parallelization Strategy • Five levels of parallelization are to be implemented: • Level 1– Parallelization of the NES code • Level 2– Parallel CFD scanning of multiple geometries • Level 3– Parallelization of GAs search • Level 4– Parallel search on multiple domains • Level 5– Parallel grid generation
3D Test-casesOptimization by OPTIMAS • DESIGN POINTS ARE DETERMINED BY: • Mach value • CL value • CONSTRAINTS ON (per section): • (t/c)max • Leading edge radius • Trailing edge angle • Pitching moment CM • Beams at 2 locations
Wing geometry :Parameterization • Wing planform is fixed • Root profile is not changed • Wing surface is generated by linear interpolation in span direction • The number of sectional airfoils is fixed • Shapes of sectional airfoils are determined by Bezier Splines • Locations of sectional airfoils are determined by twist and dihedral
Generic Business Jet Design M=0.75 CL=0.52 Original Case_GBJ_1 317.5 counts 304.1 counts
Generic Business Jet Design M=0.80 CL=0.40 Case_GBJ_4 Case_GBJ_5 Original 292.0 counts 275.7 counts 276.1 counts
Generic Business Jet Design M=0.80 CL=0.40 Case_GBJ_5 Original 2Y/b = 0.44
Generic Business Jet Design M=0.80 CL=0.40 Case_GBJ_6 Case_GBJ_7 Original 292.0 counts 276.1 counts 275.6 counts
Generic Business Jet Design M=0.80 CL=0.40
Generic Business Jet Design M=0.80 CL=0.40
Generic Business Jet Design M=0.80 CL=0.40
Generic Business Jet Design M=0.80 CL=0.40
Computational efforts for one-point 3D wing optimization in wing-body configuration 624 processors Direct application of GA search Pop.size=100; 200 generations CPU time CFD runs 20000 177.2 years 15 11.9 years 20000 + Hierarchy principle 19 228.7 days 1050 + ROM-LAM approach 329 16.7 hours + multilevel parallelization 1050
Automatic “discovery” of known aerodynamic trends (1) Supercritical airfoils • The phenomenon was found in the 1950’s, but the practical design of supercritical airfoils is highly complicated especially in the 3D case of a swept wing where supercritical airfoils must be combined with more conventional aerodynamic profiles. • Thus the optimization can automatically “discover” sophisticated aerodynamic shapes.
Automatic “discovery” of known aerodynamic trends (2) Leading edge droop • This is a method of introducing a local twist in the leading edge area of the airfoil, which allows to avoid the overloading of the region at moderate angles of attack. • The optimization method also “discovered” this trend in 3D cases.
Conclusions (1) • A new robust tool (code OPTIMAS) for multipoint multi-constrained design of wing-body aircraft configurations has been developed at IAI. • The capability of the method was illustrated through optimization of transport-type aircraft configuration
Conclusions (2) • It was demonstrated that the proposed method allows: * to ensure a low drag level in cruise regime * to handle a required number of constraints * to achieve good off-design performance at take-off conditions and high Mach zone • This technology has opened up the possibility of achieving optimum aerodynamic configuration within a dramatically more competitive design-cycle time.