Download
1 / 2
20 likes | 160 Views
Senior Project-Electrical Engineering-2012 Audible Communication System for Co-Operative and Social Robotic Behavior James Padgett Advisor: Prof. James Hedrick . Abstract :

E N D
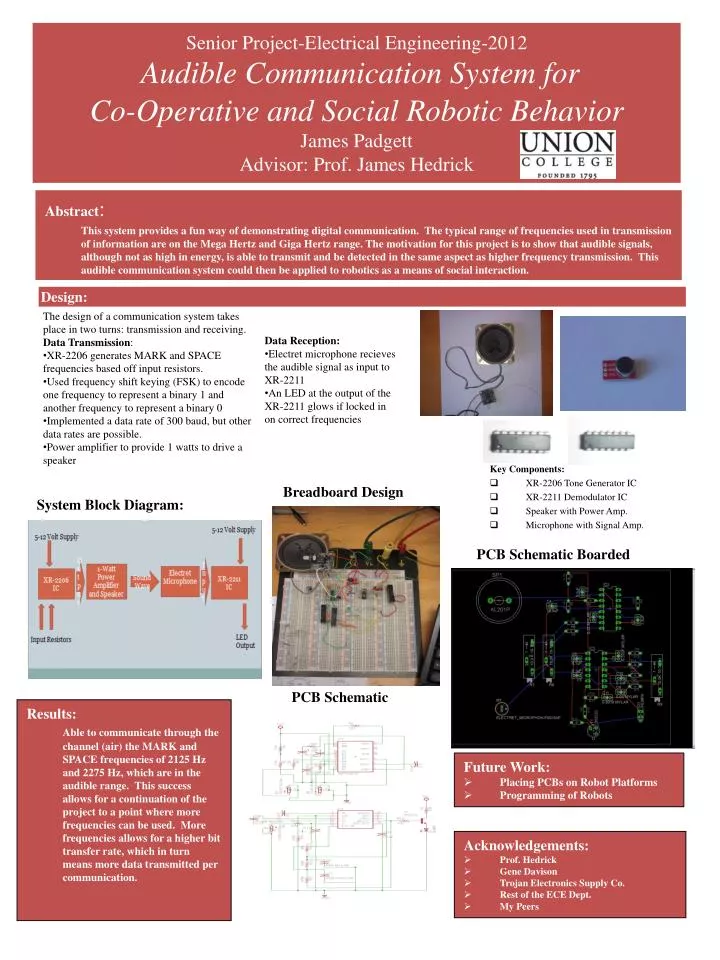
Senior Project-Electrical Engineering-2012Audible Communication System for Co-Operative and Social Robotic BehaviorJames PadgettAdvisor: Prof. James Hedrick Abstract: This system provides a fun way of demonstrating digital communication. The typical range of frequencies used in transmission of information are on the Mega Hertz and Giga Hertz range. The motivation for this project is to show that audible signals, although not as high in energy, is able to transmit and be detected in the same aspect as higher frequency transmission. This audible communication system could then be applied to robotics as a means of social interaction. Design: • The design of a communication system takes place in two turns: transmission and receiving. • Data Transmission: • XR-2206 generates MARK and SPACE frequencies based off input resistors. • Used frequency shift keying (FSK) to encode one frequency to represent a binary 1 and another frequency to represent a binary 0 • Implemented a data rate of 300 baud, but other data rates are possible. • Power amplifier to provide 1 watts to drive a speaker • Data Reception: • Electret microphone recieves the audible signal as input to XR-2211 • An LED at the output of the XR-2211 glows if locked in on correct frequencies Key Components: • XR-2206 Tone Generator IC • XR-2211 Demodulator IC • Speaker with Power Amp. • Microphone with Signal Amp. Breadboard Design System Block Diagram: PCB Schematic Boarded PCB Schematic Results: Able to communicate through the channel (air) the MARK and SPACE frequencies of 2125 Hz and 2275 Hz, which are in the audible range. This success allows for a continuation of the project to a point where more frequencies can be used. More frequencies allows for a higher bit transfer rate, which in turn means more data transmitted per communication. • Future Work: • Placing PCBs on Robot Platforms • Programming of Robots • Acknowledgements: • Prof. Hedrick • Gene Davison • Trojan Electronics Supply Co. • Rest of the ECE Dept. • My Peers



















